Series-parallel movable heavy load casting robot
A robot and hybrid technology, applied in the direction of casting equipment, manipulators, manufacturing tools, etc., can solve the problems of low load capacity, casting defects, poor working environment, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
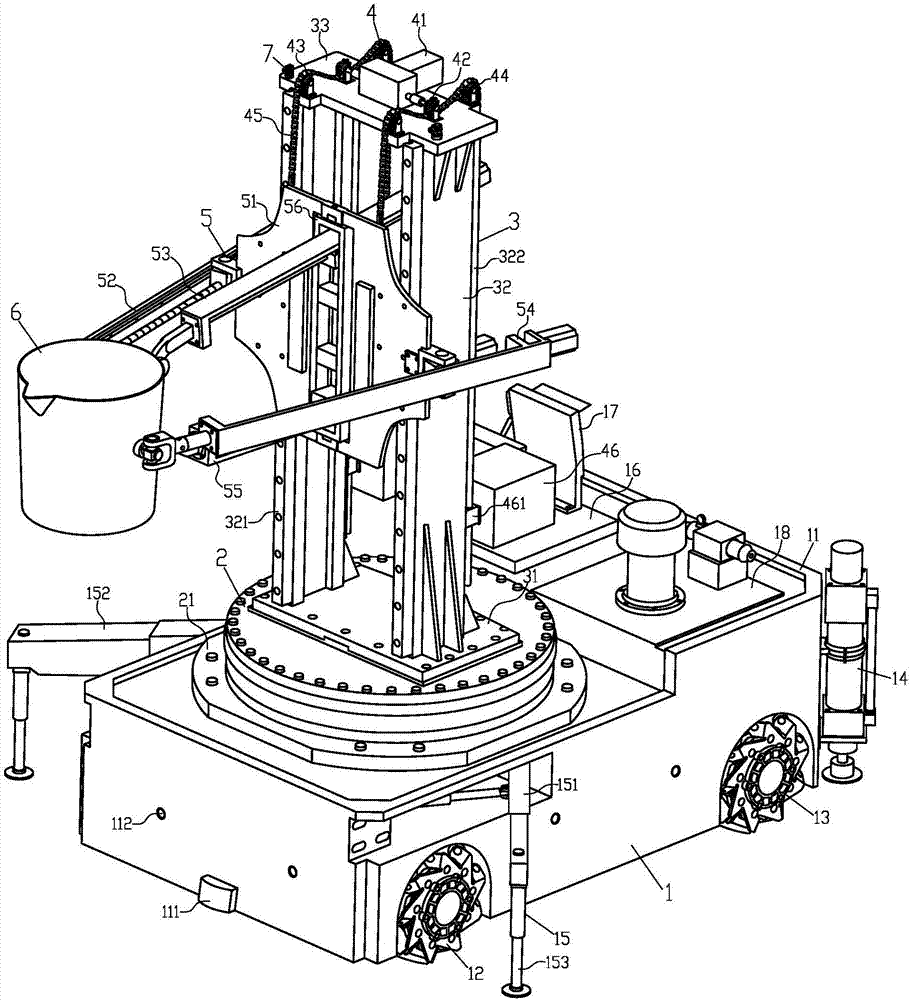
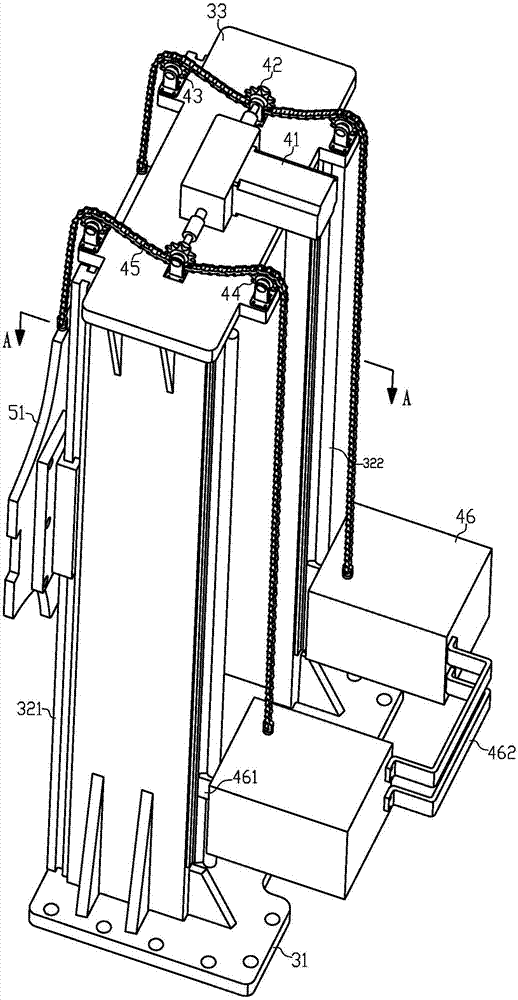
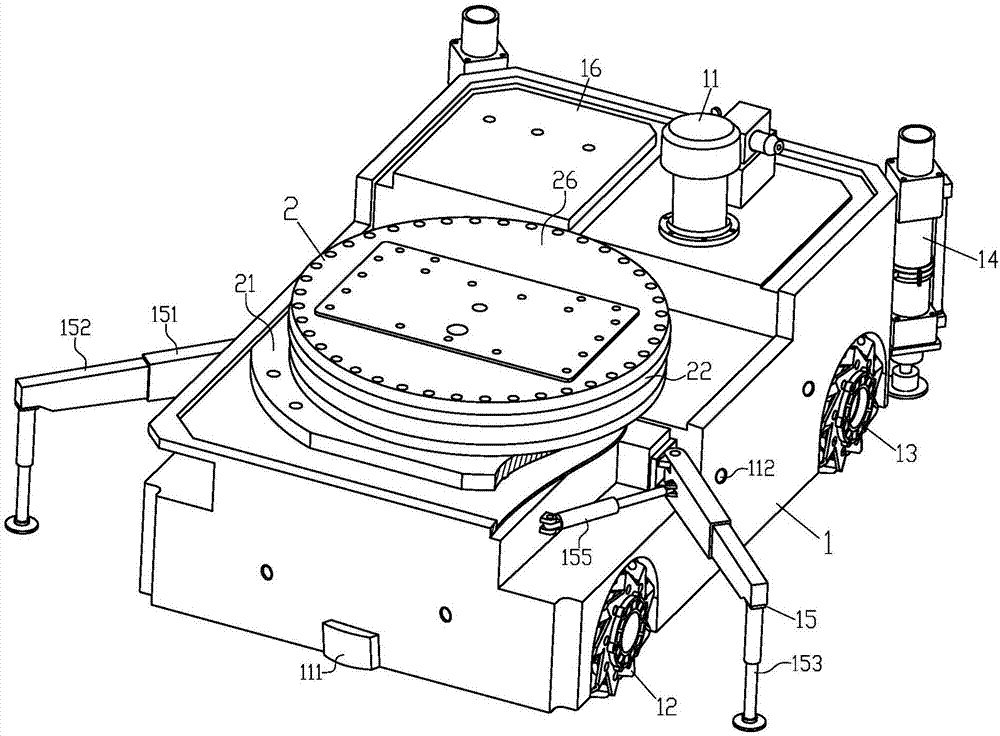
[0032] Such as figure 1 , figure 2 , image 3 , Figure 4 , Figure 7 and Figure 11 As shown, a hybrid mobile heavy-duty casting robot includes a four-wheel-drive wheeled mobile platform 1, a slewing device 2, a column assembly 3, a lifting drive device 4, a parallel working arm 5, an end effector 6 and binocular vision System 7. Wherein, the four-wheel-drive wheeled mobile platform 1 is a bearing and mobile platform of the present invention, comprising a platform frame 11, a front drive wheel 12, a rear drive wheel 13, a rear hydraulic support leg 14, an adjustable hydraulic support leg 15, Controller 16 , monitor 17 and hydraulic pump station 18 . The bottom of the front and rear ends of the platform frame 11 is provided with a navigation sensor 111, and the navigation sensor 111 adopts a magnetic navigation sensor or a laser scanner or an infrared emitter or an ultrasonic transmitter, and is also provided in the platform frame 11. There is a digital biaxial level, ...
specific Embodiment approach 2
[0038] Such as figure 1 , Figure 7 , Figure 8 , Figure 9 and Figure 11 As shown, the first branch chain 52 includes a first front universal joint 521 , a first telescopic group 522 and a first rear hinge 523 . Wherein, the inner end of the first rear hinge 523 is fixedly connected with the working arm mounting base 51, the rear end of the first telescopic group 522 is connected with the outer end of the first rear hinge 523 through a sliding pair, The front end of the first telescopic group 522 is fixedly connected with the rear end of the first front universal joint 521 , and the front end of the first front universal joint 521 is fixedly connected with the end effector 6 . The second branch chain 53 includes a first front hinge 531 , a second telescopic group 532 , a second rear hinge 533 and a first vertical hinge 534 . Wherein, the front end of the first front hinge 531 is fixedly connected to the end effector 6, the front end of the second telescopic group 532 is...
specific Embodiment approach 3
[0041] Such as figure 1 , Figure 10 and Figure 11 As shown, the end effector 6 specifically adopts a multi-finger asynchronous pneumatic gripper, and the multi-finger asynchronous pneumatic gripper includes an air gripper connecting seat 6-1, a connecting bracket 6-2, and an air gripper mounting plate 6-3, jaw finger 6-4 and finger cylinder 6-5. Wherein, the air claw connecting seat 6-1 is fixedly installed on the front end of the parallel working arm 5; the upper end of the connecting bracket 6-2 is fixedly connected with the air claw connecting seat 6-1, and the lower end of the connecting bracket 6-2 It is fixedly connected with the top of the air claw mounting plate 6-3, and a reinforcing connecting rod 6-21 is also provided in the middle of the connecting bracket 6-2; a guide sleeve 6 is provided at the bottom of the air claw mounting plate 6-3 -31, anti-slip rubber 6-41 is provided on the inside of the lower end of the jaw finger 6-4, and a guide rod 6-42 is provide...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com