Teleoperation method and system for grabbing objects using space mechanical arm based on simulation
A space manipulator, teleoperation technology, applied in manipulators, program-controlled manipulators, image data processing, etc., can solve the problems of inability to predict the relative state of the space manipulator, difficult to make effective decisions, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0074] The principles and features of the present invention are described below in conjunction with the accompanying drawings, and the examples given are only used to explain the present invention, and are not intended to limit the scope of the present invention.
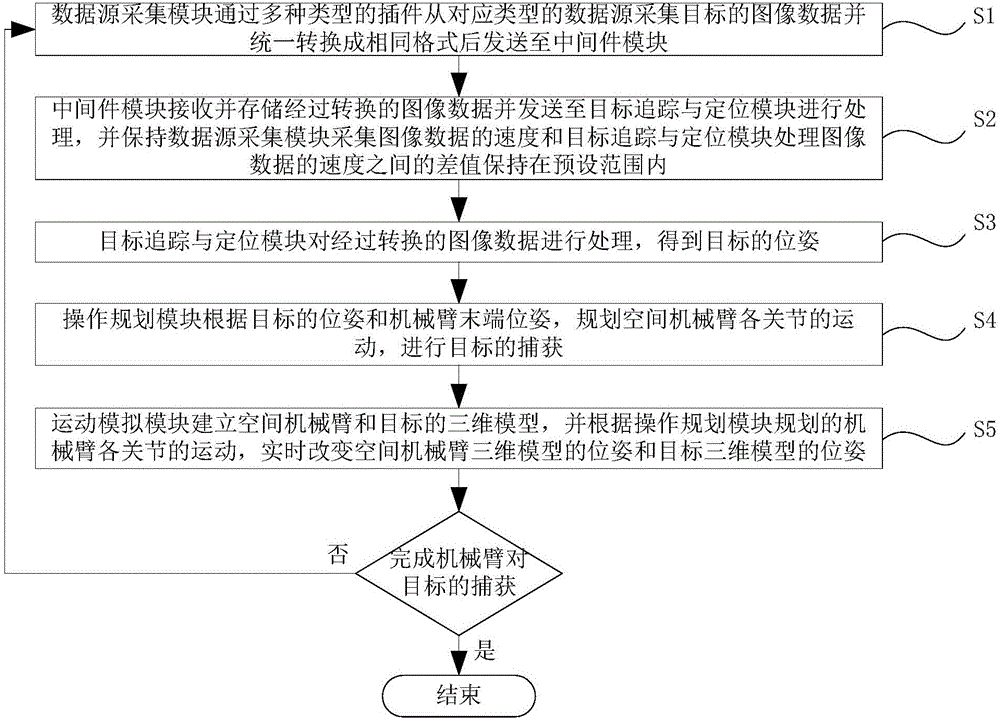
[0075] Such as figure 1 As shown, a teleoperation system based on simulation of a space manipulator to capture a target provided by the present invention is composed of a data source acquisition module, a middleware module, a target tracking and positioning module, an operation planning module and a motion simulation module, and its realization method Such as figure 2 shown, including the following steps:
[0076] S1. The data source collection module collects the image data of the target from corresponding types of data sources through various types of plug-ins, converts them into the same format and sends them to the middleware module;
[0077] S2. The middleware module receives and stores the converted image d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com