Rocker Suspension Speed Differential Steering Unmanned Maneuvering Platform Based on Elbow Internal Transmission
A transmission mechanism and suspension technology, which is applied in the field of rocker suspension type differential steering unmanned aerial vehicle platform, can solve the problem of large unsprung mass of suspension, limited power power, and difficulty in meeting the requirements of high-speed and high-mobility unmanned aerial vehicle platform. and other problems, to achieve the effect of improving maneuverability, reducing unsprung mass, and light weight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be described in detail below with reference to the accompanying drawings and examples.
[0024] The invention provides a rocker suspension type speed difference steering unmanned maneuvering platform based on elbow internal transmission, and in particular relates to a speed difference steering unmanned maneuvering platform adopting rocker suspension multi-wheel independent drive speed difference steering.
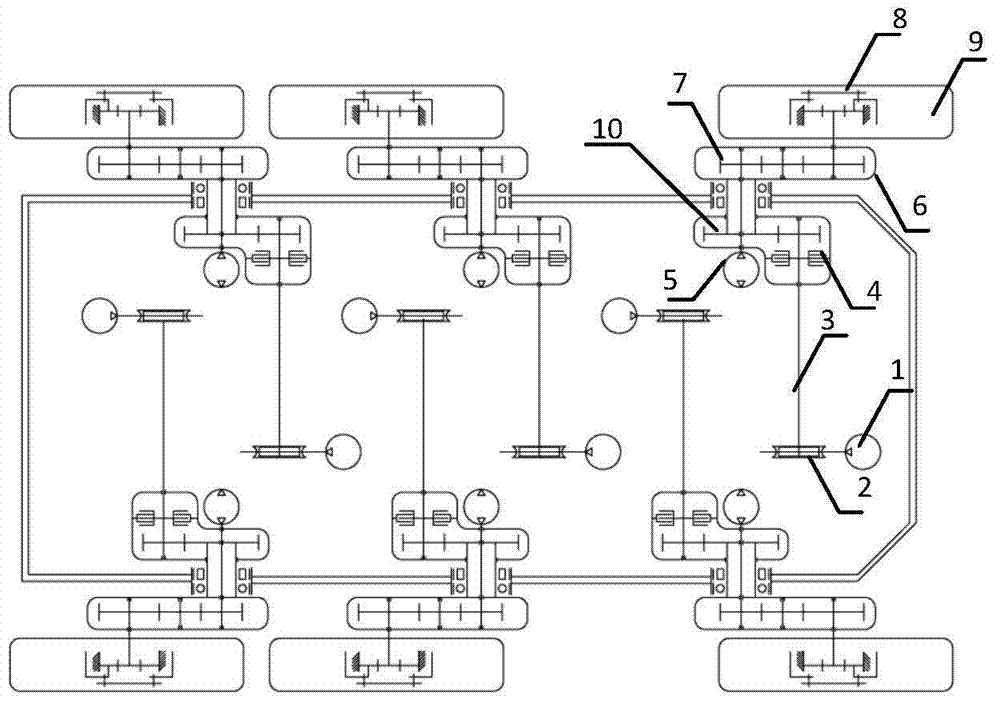
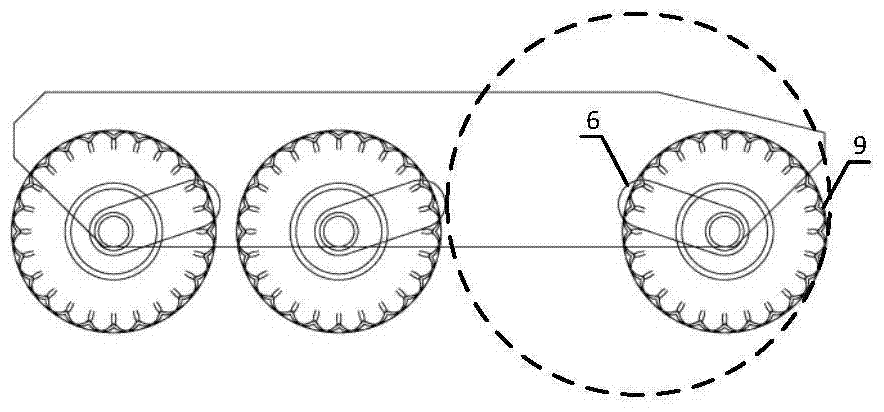
[0025] like figure 1 As shown, the rocker arm suspension type speed difference steering non-operating platform based on elbow internal transmission has a total of six sets of speed difference steering non-driving units symmetrically arranged, and each unit includes: rocker suspension unit and wheel independent drive unit ;
[0026] The rocker suspension unit is mainly composed of a suspension control motor 1, a suspension adjustment mechanism 2, a torsion bar 3, a friction damper 4, a suspension rocker arm 6 and a fixed axis gear pair 10; ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com