Remote three-dimensional scanning system and method based on machine vision
A three-dimensional scanning and machine vision technology, applied in the field of remote three-dimensional scanning methods and systems, can solve the problems of complex equipment structure, harsh scanning conditions, and difficulty in ensuring binocular parallelism.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0099] The present invention provides a kind of three-dimensional scanning system and method, wherein the present invention uses software environment: Win7+Vs2010 etc.; Hardware environment: Intel (R) Core (TM) 2QuadCPUQ84002.66HzCPU, more than 2G internal memory; Development language: C++, C; Library Function: OpenCV computer vision library 2.3 or above.
[0100] First introduce the hardware part of the present invention:
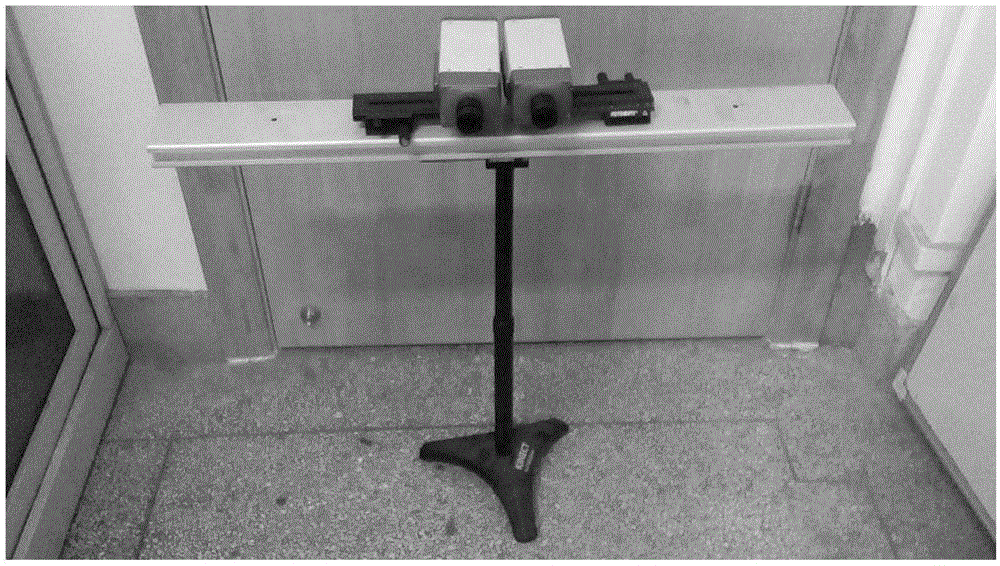
[0101] A remote three-dimensional scanning system based on machine vision, including a camera, a pair of cameras installed on a horizontal bracket, and the optical axes of the two cameras are parallel to each other and parallel to the horizontal plane; the two cameras are connected to the computer system through a switch ; The scanned object is placed in the common field of view in front of the two cameras, and the scanned object is scanned at a uniform speed by a laser; the scanning system also includes a calibration plate and a calibration light source a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com