A line patrol deicing robot and its obstacle surmounting method
A technology of robots and deicing wheels, applied in the installation of overhead line/cable equipment, electrical components, cables, etc., can solve the problems of threatening the personal safety of workers, high labor intensity, casualties and other problems, and achieve simple mechanism movement and mechanical structure. Compact, flexible effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] The present invention will be described in further detail below in conjunction with embodiment.
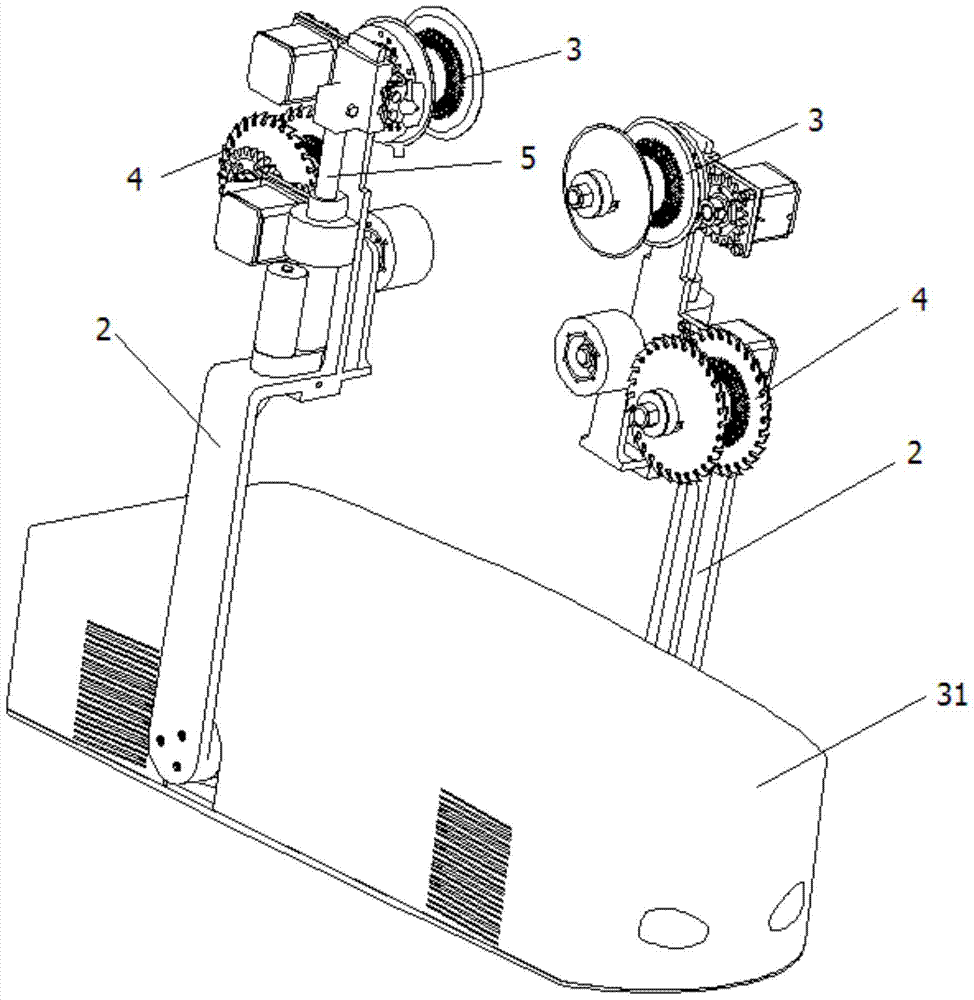
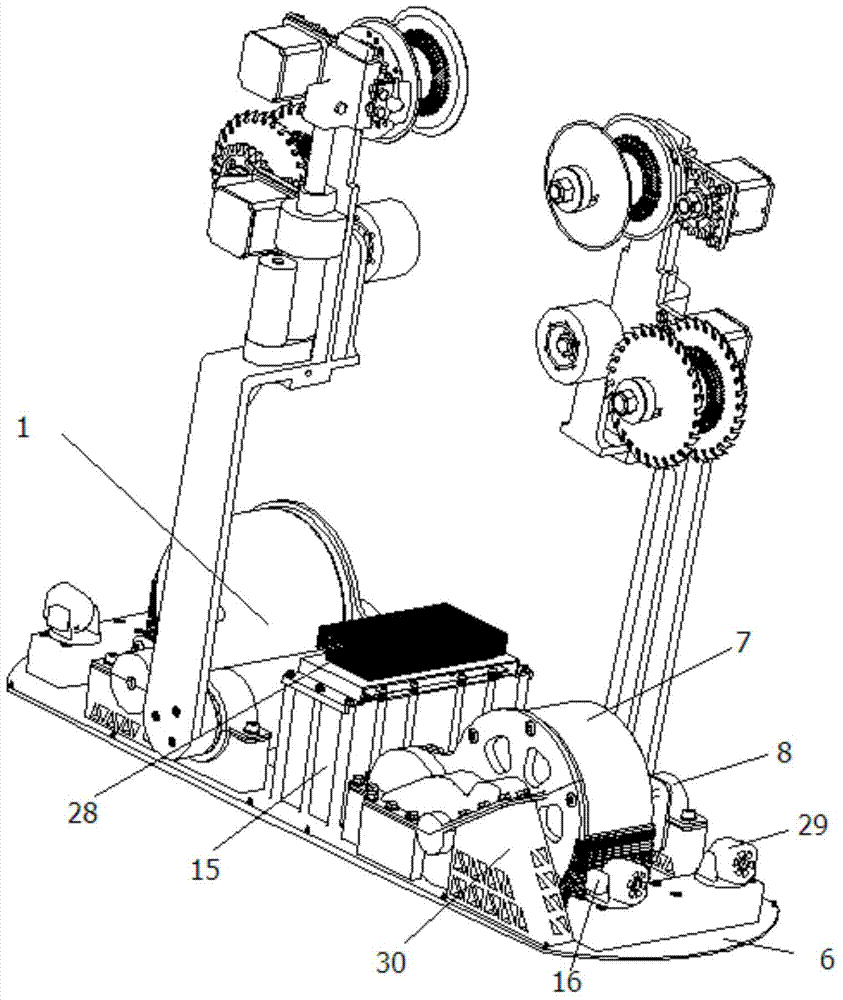
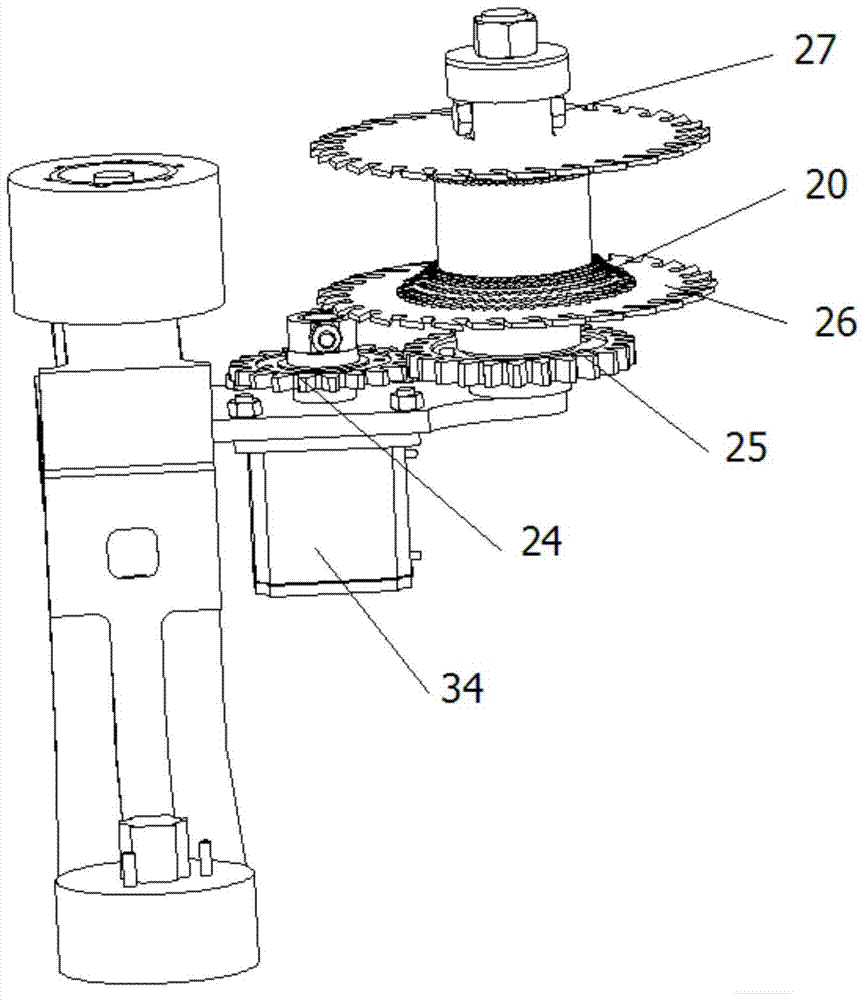
[0044] according to Figure 1 to Figure 8As shown, a line patrol deicing robot includes a body 1, a moving arm 2 is respectively arranged at the front and rear of the body, the upper end of the moving arm 2 is provided with a driving wheel 3 and a deicing wheel 4, and the driving wheel 3 and The deicing wheels 4 are all connected to the drive motor 34, the driving wheel 3 is installed above the deicing wheel 4 through the electromagnetic push rod 5, and a cable to be inspected is erected between the driving wheel 3 and the deicing wheel 4, and on the bottom plate 6 of the body 1 A first motor 7 and a second motor 8 are installed, and the output shaft of the first motor 7 is connected to the first shaft 9 through a gear set, and the gear set is clamped on a bracket 30 provided on the base, and the first shaft 9 The second shaft 10 is connected to the lower end of the moving...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com