Intelligent dual-integral sliding mode control method for electronic throttle based on observer
An electronic throttle and control method technology, which is applied in electrical control, engine control, fuel injection control, etc., can solve the problems that the feedforward compensator cannot be compensated, the controller is difficult, and the throttle control is solved, so as to eliminate tracking static error, Improve stability and overcome hard-to-determined effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The present invention will be further described below in conjunction with accompanying drawing.
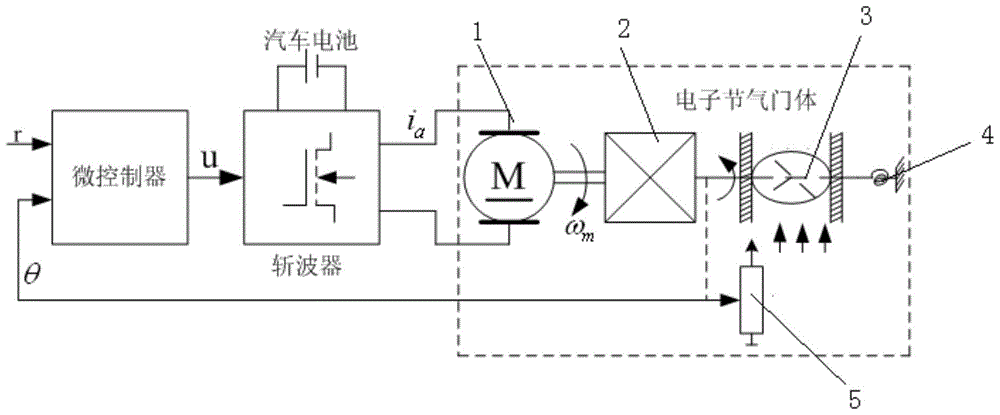
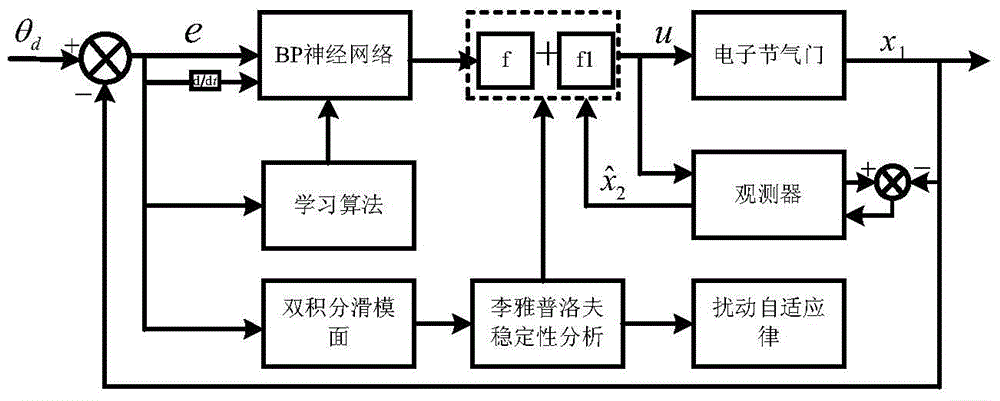
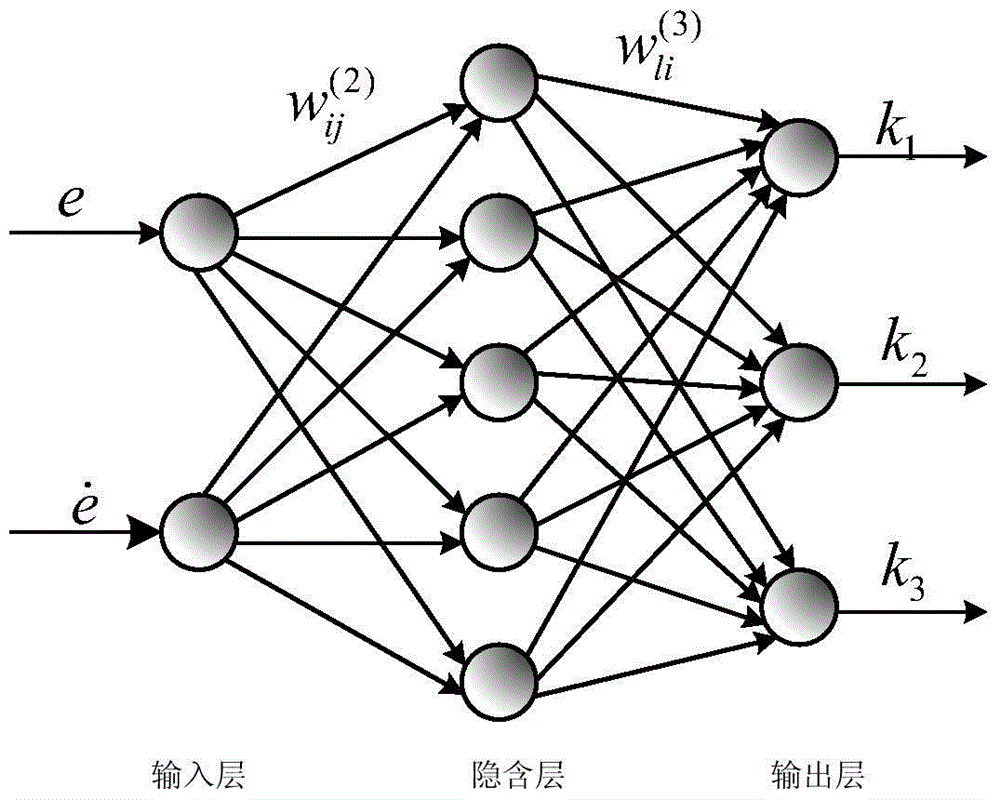
[0034] The observer-based electronic throttle intelligent double-integral sliding mode control method of the present invention adopts an expansion state observer, and according to the actual opening of the throttle θ(x 1 ) to the variation of throttle opening x 2 Estimated to obtain the estimated value of the change in throttle opening Through the Lyapunov stability theorem combined with sliding mode control and BP neural network, the intelligent double integral sliding mode control law and the disturbance adaptive law are obtained to control the opening of the electronic throttle and compensate the disturbance. The parameters of the intelligent double-integral sliding mode controller are adaptively designed through the BP neural network. The input of the BP neural network is the error e and the error change between the actual opening of the throttle and the expected open...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com