Road and obstacle detecting method based on remotely piloted vehicles
A technology for obstacle detection and unmanned vehicles, which is applied in image data processing, instruments, character and pattern recognition, etc. It can solve problems such as poor robustness of roadside detection, lack of slope detection, and difficulty in fusion of front and rear frames
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
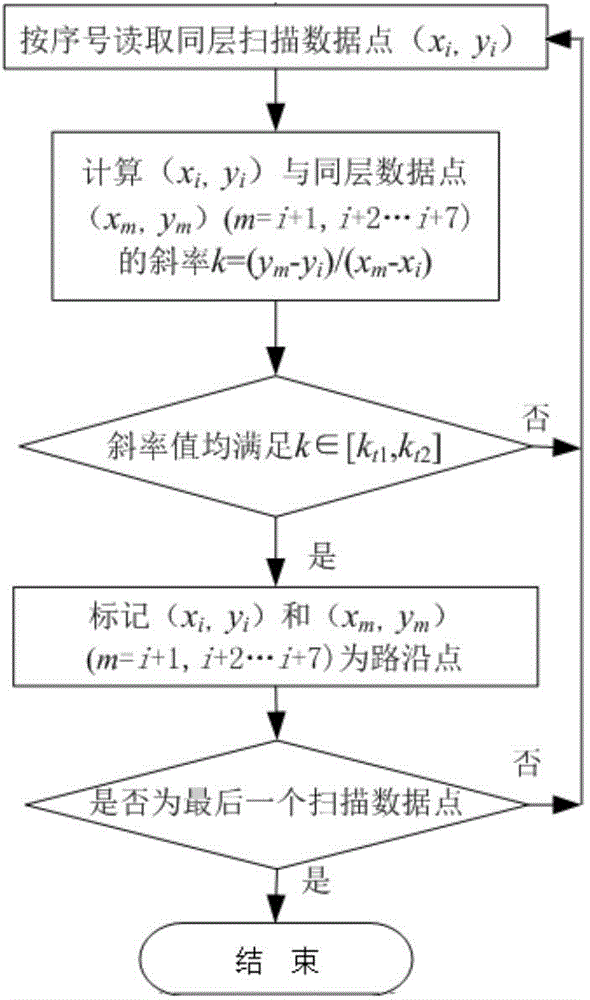
[0060] In this embodiment, the IBEO-LUX 2010 four-line laser radar is selected as the main sensor, combined with the vehicle camera, odometer and other sensors, and the algorithm is written in the VS2010 environment to realize a road and obstacle detection method in an unmanned vehicle. Specific implementation methods such as Figure 6 shown, including the following steps:
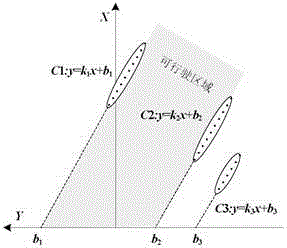
[0061] Step 1, see attached figure 1 According to the characteristics of data points along the road, the roadside data set is extracted from numerous lidar data.
[0062] Through experimental analysis of the difference between the data points scanned onto the roadside and other radar data points, it is concluded that the data points along the roadside have the following attributes: when the laser radar is scanned onto the roadside, the returned data points show stability in the sa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com