Wave integral bilateral teleoperation control method based on LS-SVM (least square support vector machine) delay predication
A technology of remote operation control and wave integration, which is applied in the direction of adaptive control, general control system, control/regulation system, etc., to achieve the effect of ensuring stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention proposes a wave-integrated bilateral teleoperation control method based on LS-SVM for delay prediction, which will be described in detail below with reference to the content of the invention and the accompanying drawings.
[0033] 1. Building the principle block diagram of teleoperation system
[0034] (1) Build the schematic diagram
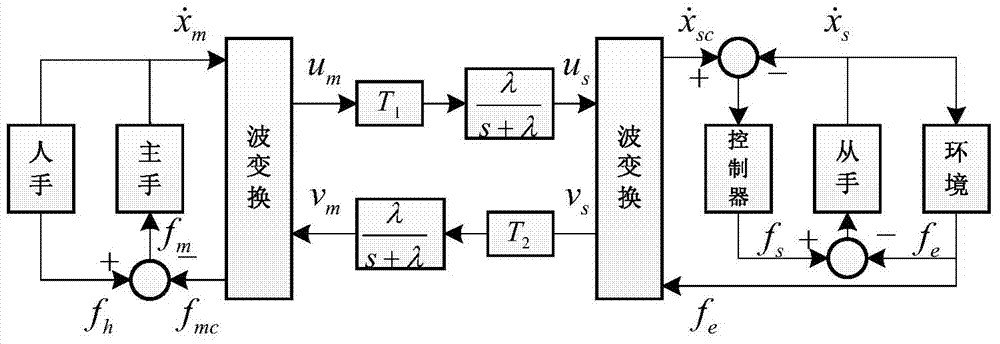
[0035] Refer to the principle of ordinary passive wave variable method (see figure 1 ), design the principle block diagram of wave integral bilateral teleoperation control method based on LS-SVM for delay prediction, mainly including master hand, master controller, communication link, slave controller, slave hand, LS-SVM delay prediction link, wave integral link (see figure 2 );
[0036] (2) Define the functional block diagram (see figure 2 ) in the meaning of each parameter and the relationship between them:
[0037] In the figure, the human hand exerts a force f h and the contact force f fed back from the s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com