Low orbit satellite multi-sensor fault tolerance autonomous navigation method based on federal UKF algorithm
A low-orbit satellite and multi-sensor technology, applied in navigation, surveying and navigation, integrated navigator, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
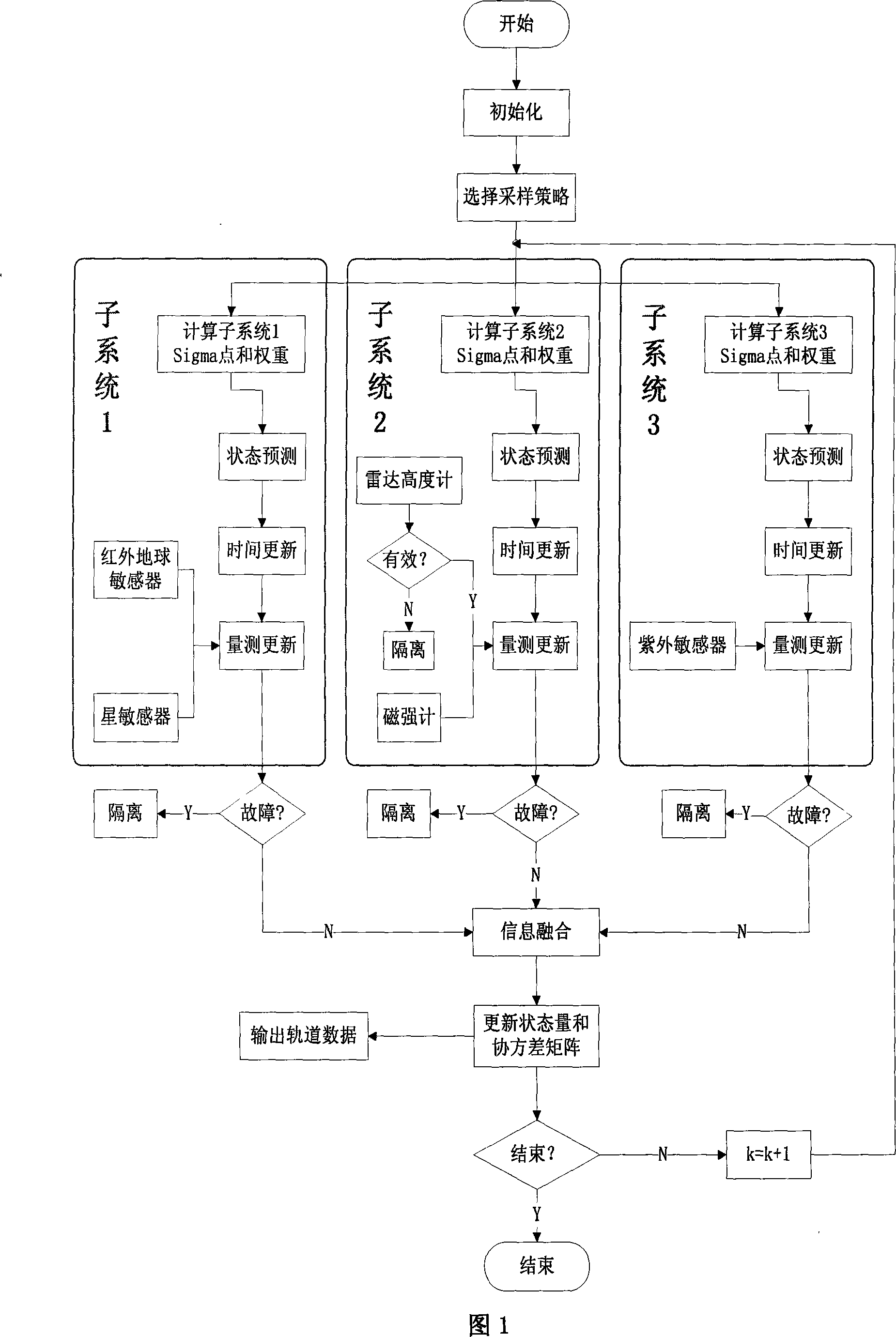
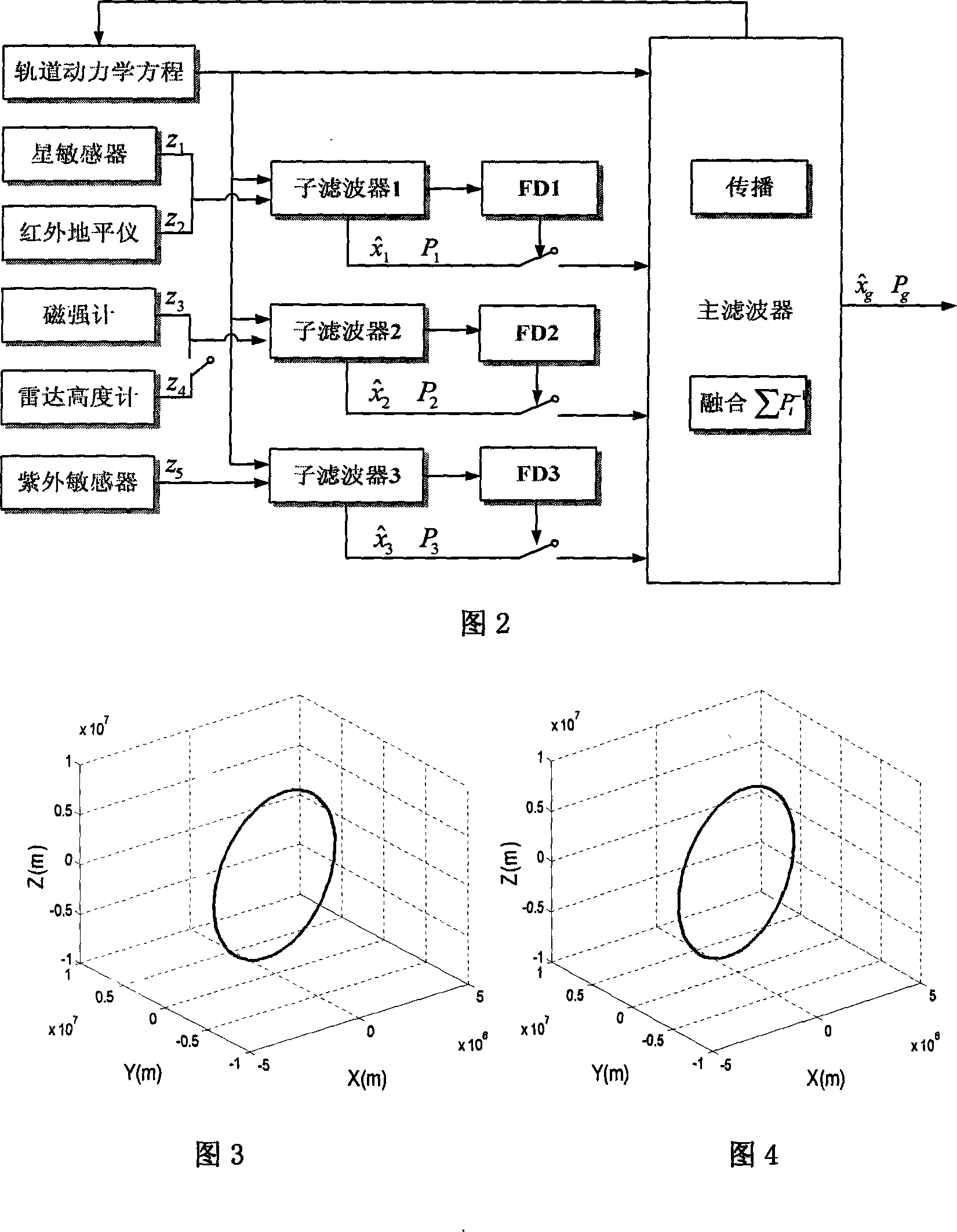
[0098] The specific composition diagram of this example is shown in Figure 1, and the implementation process is shown in Figure 2. The orbit data is generated by STK (satellite simulation toolkit) software, and the specific simulation conditions are as follows;
[0099] ①The simulation time is from 12:00 on June 1, 2008 to 24:00 on June 1, 2008, and the sampling period T is 10s. The nominal orbit data is: semi-major axis: a=6823.082km; eccentricity: e=1.83×10 -16 ; Orbital inclination: i=97.2°; right ascension of ascending node: Ω=157.5°; near ascending angle: ω=0°.
[0100] ②In order to simulate the real movement of the satellite in orbit, the mechanical model JGM-3 is used when calculating the satellite orbit, and the following perturbation factors are considered: the earth's non-spherical perturbation; the sun's gravity, the moon's gravity; the sun's light pressure; atmospheric resistance .
[0101] ③Measuring instrument accuracy: the navigation star adopts 80 brightest s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com