Planning method for smooth trajectory of robot in Cartesian space
A Cartesian space and robotics technology, applied in the field of robotics, can solve problems such as overspeed, unsmooth, and robot trajectory pauses
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
[0076] The specific flow of the embodiment of the present invention: judgment of the transition area—non-transition section planning—transition section position planning—transition section posture planning.
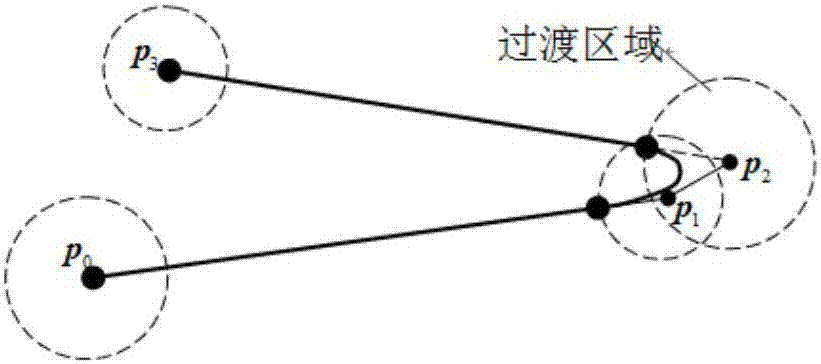
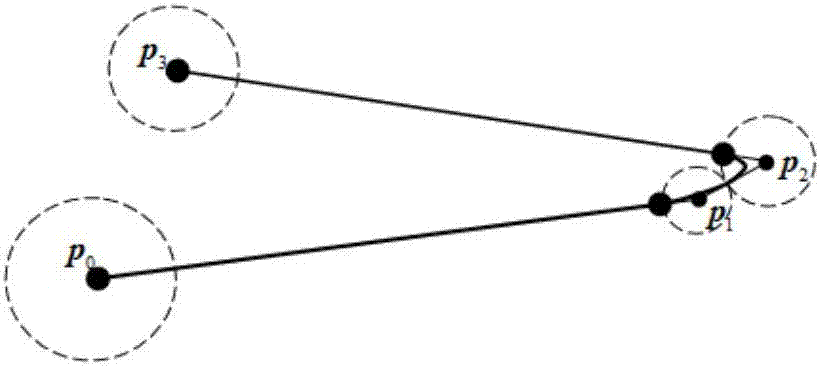
[0077] As shown in Figure 2 (a) and Figure 2 (b), the size of the path transition area involved in the present invention is set by the transition level. When the robot moves to the transition area, it will fly over the current path point and move towards the next path point. Point p1 in the figure, if the next path point is still in the transition area, then directly cross the next path point, such as point p2 in Figure 2(a).
[0078] Such as image 3 Shown is the specific process of judging the path transition situation. Firstly, the transition distance of each program segment is determined according to the transition level. The straight line distance is its length, and the arc distance is determined by the radian of the arc. The judgment result of the transition situat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com