Composite anti-interference controller comprising measurement and input time delay for flexible spacecraft
A flexible spacecraft and controller technology, applied in the design of anti-interference attitude controller, the field of flexible spacecraft attitude controller, can solve the problems of reduced stability, little consideration of time delay, harsh constraints, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
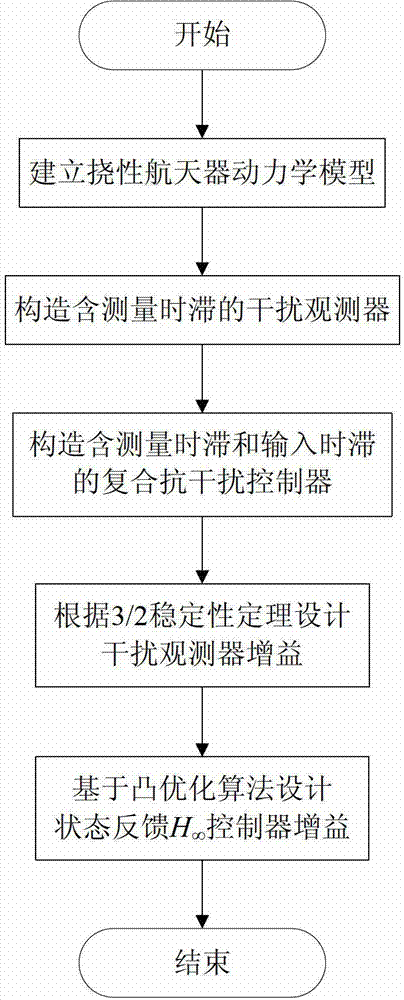
[0040] like figure 1 As shown, the realization of the present invention includes the following steps: first, establish a dynamic model of the spacecraft; secondly, construct a composite anti-jamming controller containing measurement and input time lag, and design a measurement time lag for the disturbance caused by the vibration of the flexible attachment The disturbance observer estimates it and feeds forward compensation, and designs the state feedback H for the norm bounded disturbance ∞ The controller suppresses it; again, the gain of the disturbance observer is designed according to the 3 / 2 stability theorem to ensure the stability of the pure time-delay equation of the disturbance estimation error; finally, the compound control with measurement and input time-delay is based on the convex optimization algorithm System Design Status Feedback H ∞ controller gain to make the system stable and satisfy a certain H ∞ performance. Specific steps are as follows:
[0041] 1. E...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com