Manual three-degree-of-freedom micro manipulator for minimally invasive surgery
A minimally invasive surgery and micromanipulator technology, applied in surgical robots, surgery, applications, etc., can solve the problems of surgical stability and accuracy, lack of freedom of finger pitching, etc., and achieve good stability and flexibility.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The present invention is described in more detail below in conjunction with accompanying drawing example:
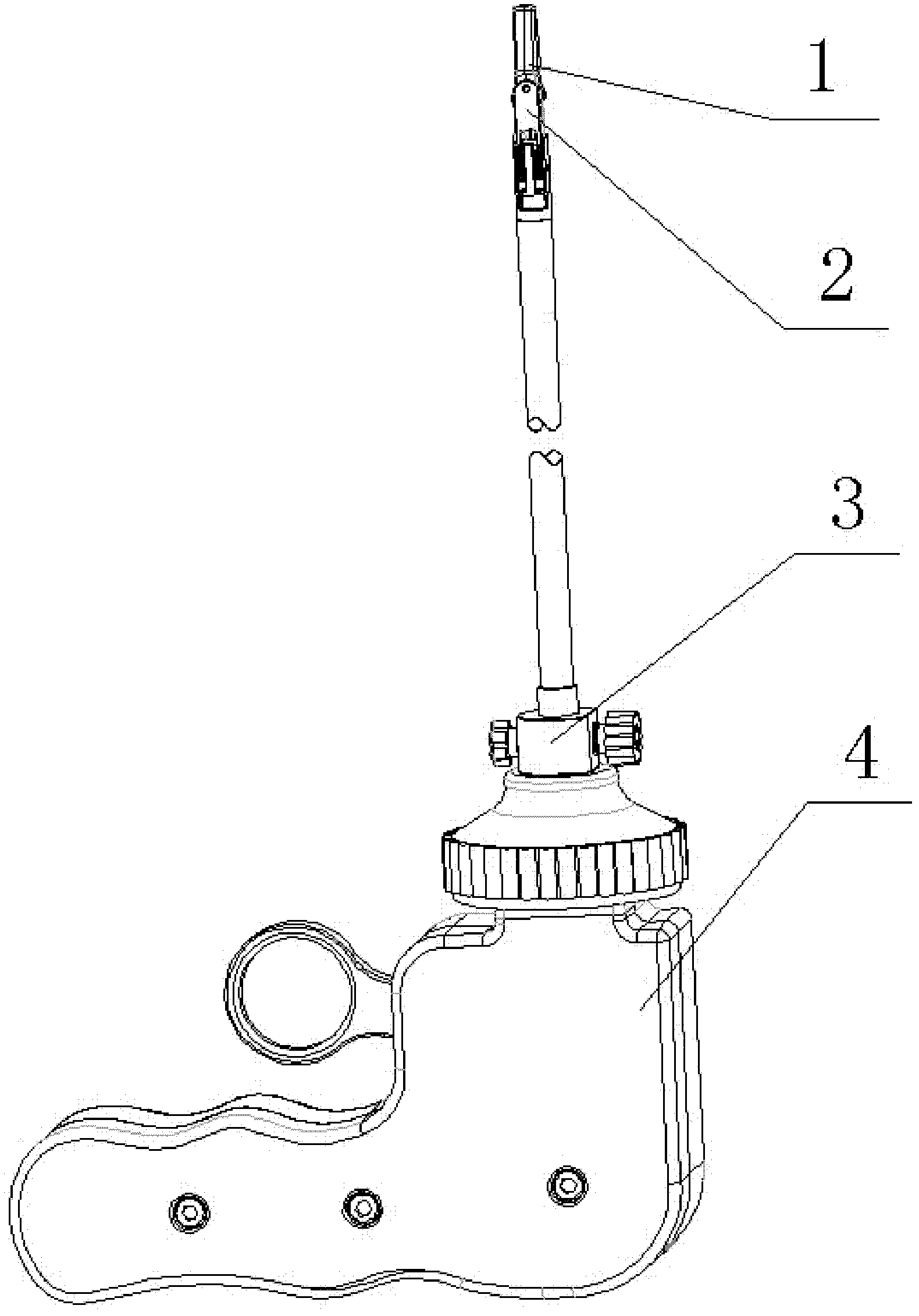
[0019] combine Figure 1-7 , the present invention is mainly composed of a fingertip clamping mechanism 1, a fingertip pitching mechanism 2, a rotating mechanism 3, and a handle portion 4.
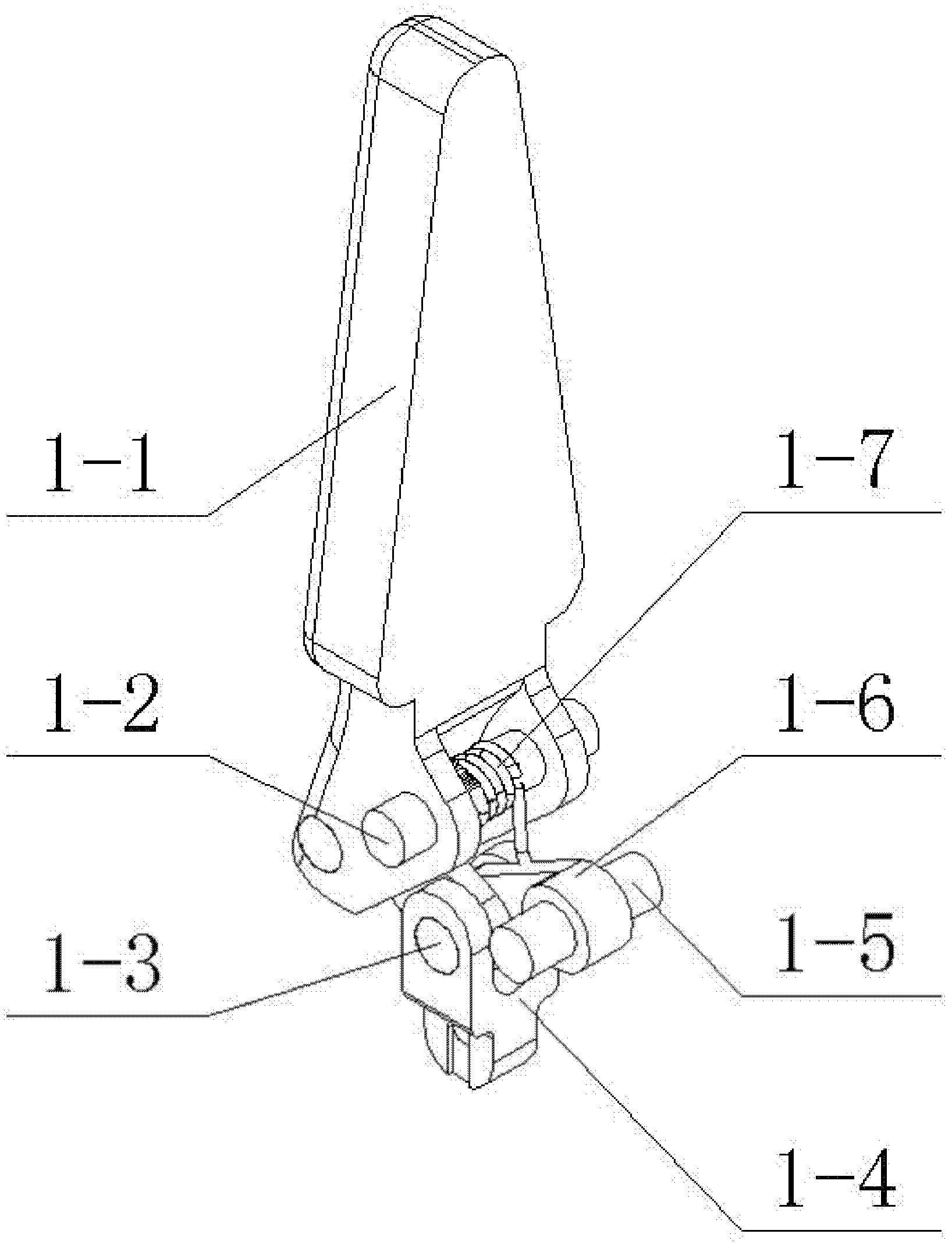
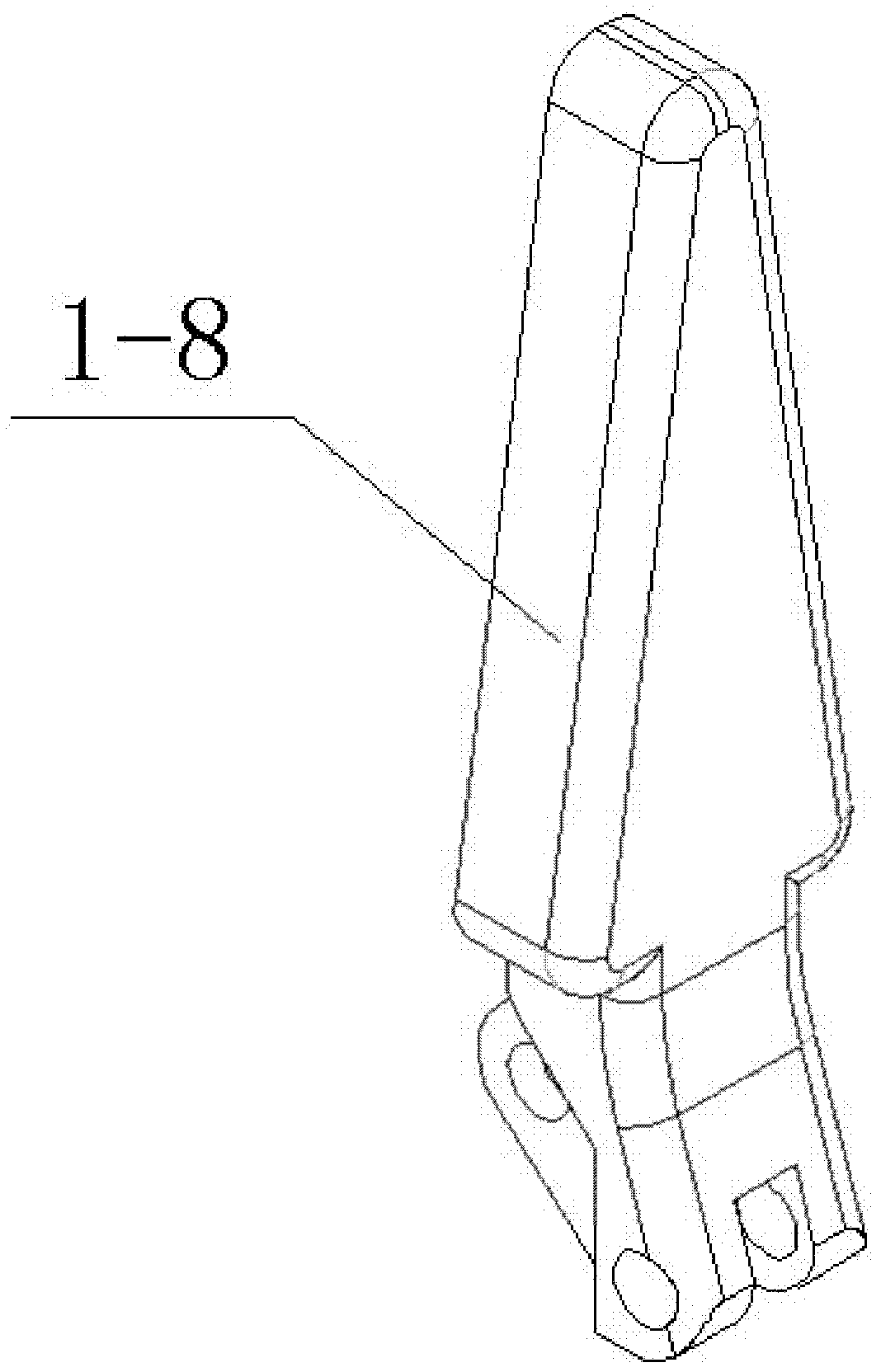
[0020] combine figure 2 , 3 , the fingertip clamping mechanism 1 is composed of clamping forceps A1-1, clamping rotating shaft 1-2, connecting plate central axis 1-3, traction bridge 1-4, connecting pin shaft 1-5, connecting plate 1-6, Resetting torsion spring 1-7, clamping forceps flap B1-8 is formed. The torque of the reset torsion spring keeps the fingertip valve in a clamped state, and the opening of the fingertip valve is realized by the pulling of the steel wire rope mentioned later, which drives the joint plate to cooperate.
[0021] combine Figure 4 , 5 , the fingertip pitch mechanism 2 is composed of the following parts: pitch connecting bridge 2-1, rack push ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com