Method for designing DCMFK (Debiased Converted Measurement Kalman filter) based on FPGA (Field Programmable Gate Array)
A Kalman filter and measurement technology, applied in the field of signal processing, to improve performance, save internal resources, and facilitate implementation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
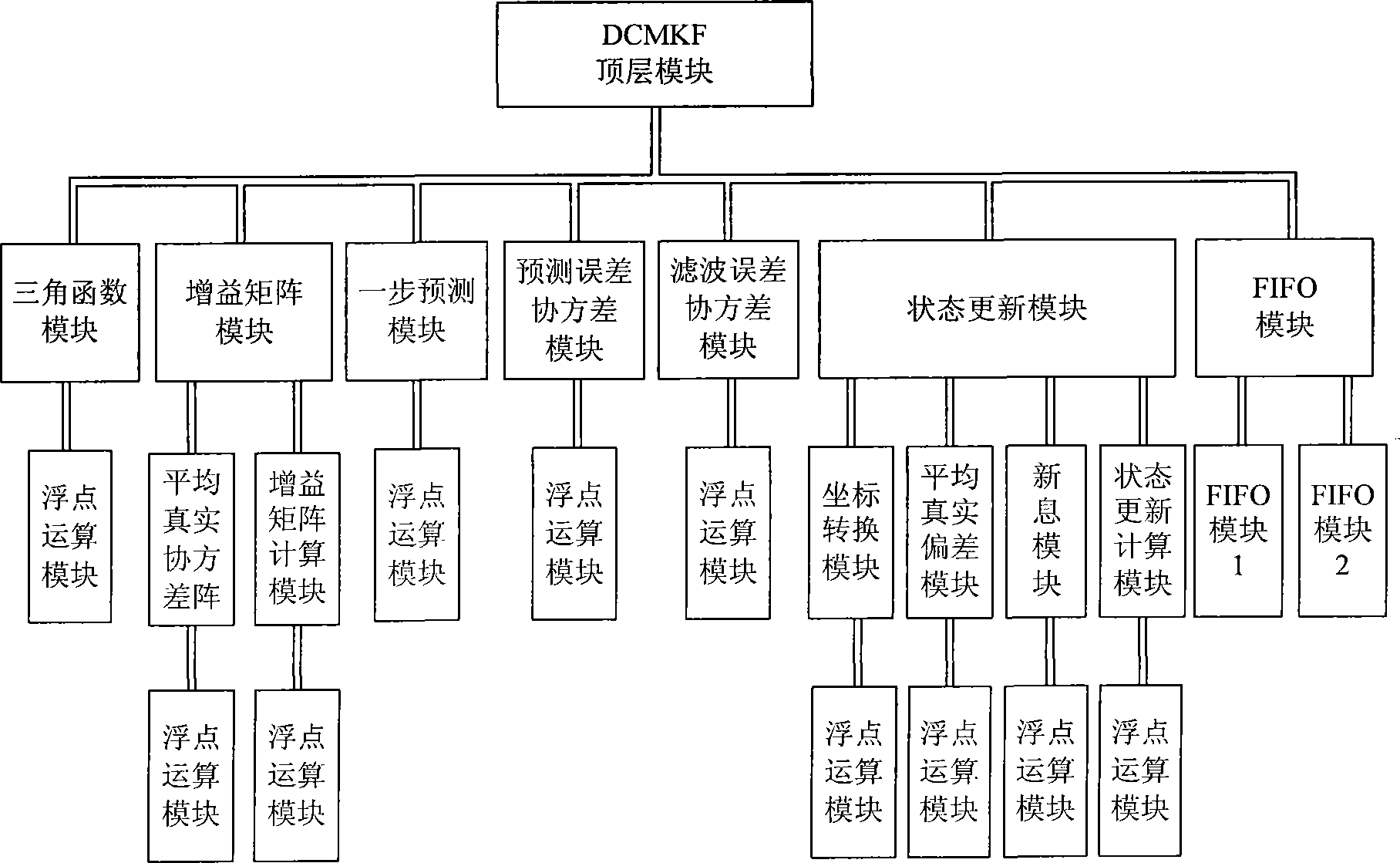
[0055] refer to figure 1 , the FPGA-based debiasing conversion measurement Kalman filter system of the present invention includes: a trigonometric function module, a one-step prediction module, a prediction error covariance module, a gain matrix module, a state update module, a filter error covariance module and a FIFO module. The gain matrix module includes an average true covariance sub-module and a gain matrix sub-module; the state update module includes a coordinate transformation sub-module, an average true deviation sub-module, an innovation sub-module and a state update sub-module. Among them, the floating-point addition, subtraction, multiplication and division operation modules are respectively called in each operation module.
[0056]In this embodiment, the radar is used to track the short-range target, and the radar data output cycle T is 0.8192ms. Select the Singer acceleration model as the dynamic model of the target. The state equation of the system is:
[00...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com