Obstacle detection method based on combination of point cloud information and deep learning
A technology of obstacle detection and point cloud information, which is applied in the field of obstacle detection, can solve problems such as the single obstacle detection method of robots and the inability to fully perceive obstacles, so as to improve intelligence, reduce data processing scale, and reduce data processing scale Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
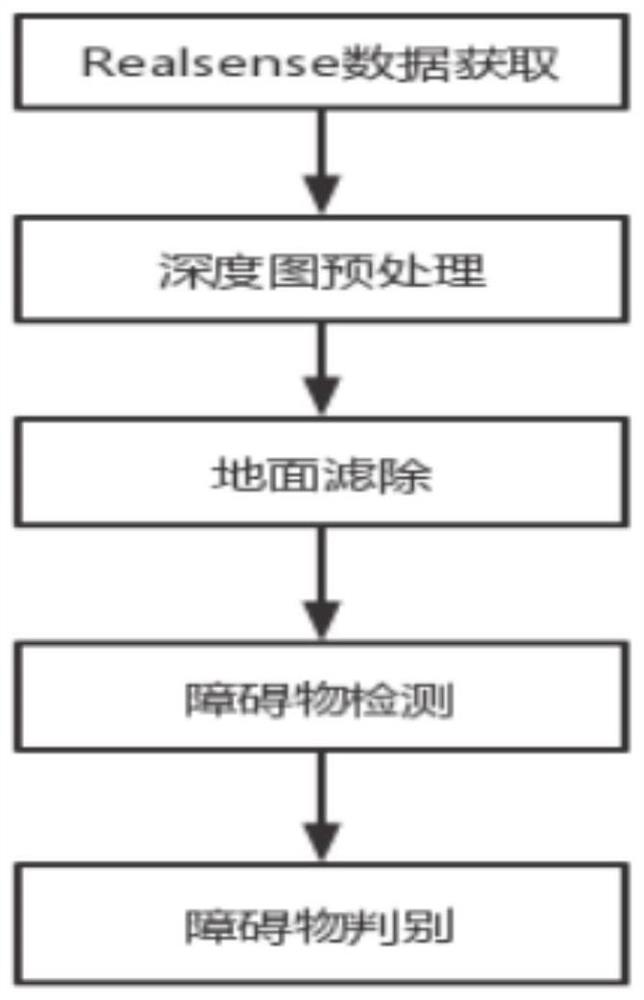
[0043] A obstacle detection method combined with point cloud information and depth learning, such as figure 1 As shown, including the following steps:
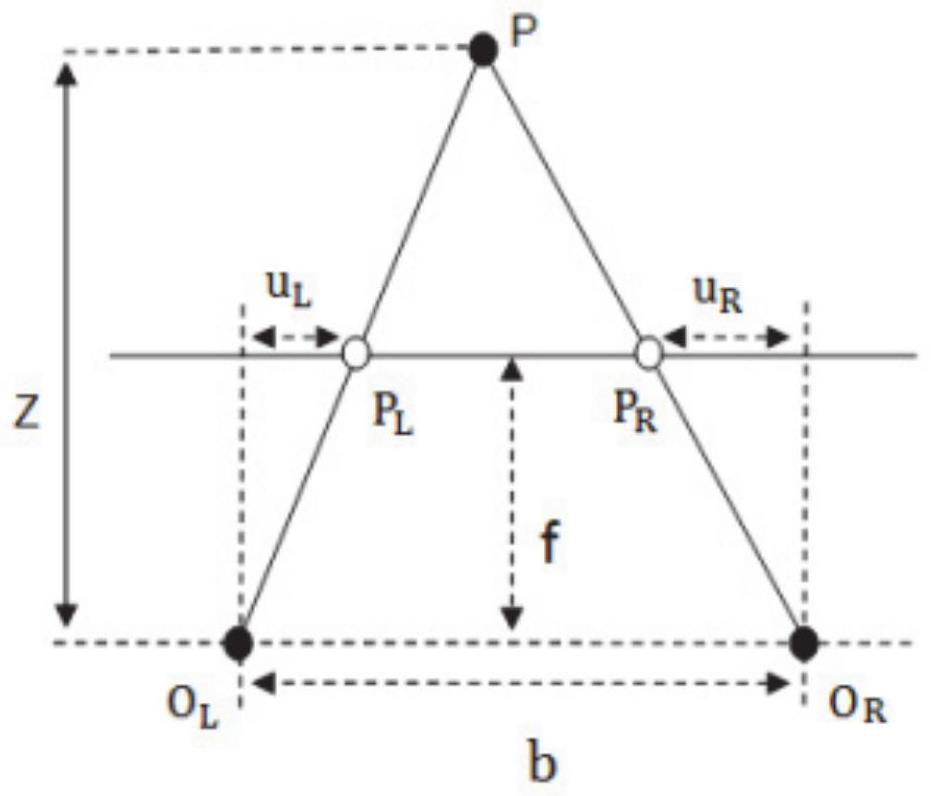
[0044] The disorder detection is obtained by using binocular vision.
[0045] In the present embodiment, the specific selection of the double-eyed visual camera is an Intel's RealSense D435 depth camera, and the front side of the camera is from left to the right is the left infrared camera, an infrared enhancement transmitter, a right infrared camera, and a visible light camera.
[0046] The camera is powered and data transmission in USB3.0, and the system is accessible. And with the REALSENSE camera and depth learning technology, the Realsense camera is widely used in 3D target detection, limb behavior analysis, robot visual navigation and avoidance, virtual reality, etc. While detecting an obstacle, classify the category of the obstacle, provides a basis for subsequent waiver.
[0047] The Realsense ranging ranges from 0.2 to 10...
Embodiment 2
[0068] A obstacle detection system combined with point cloud information and depth learning, including:
[0069] The image acquisition module is configured to obtain a point cloud image containing depth information;
[0070] The pretreatment module is configured to filter the image, remove the processing of the extension point of the distribution edge, resulting in the pretreatment point cloud information;
[0071] The ground information extraction module is configured to extract the ground information in the point cloud information, and filter out;
[0072] The initial detection module is configured to perform preliminary obstacle detection based on the remaining point cloud information, and determine the grill of the obstacle;
[0073] The determination classification module is configured to determine the type of obstacle using the preliminary obstacle using the pre-training depth learning model to determine the type of obstacle.
Embodiment 3
[0075] A computer readable storage medium in which a plurality of instructions are stored, and the instructions are adapted to load and perform the steps provided by the terminal device.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com