Wave compensation ship and compensation method thereof
A technology of wave compensation and compensation method, applied in the direction of reducing ship motion, hull, ship construction, etc., can solve the problems of less research on compensation equipment, limited compensation range, inability to adapt, etc., to achieve concise timeliness, increase compensation range, The effect of improving the ability to maintain stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
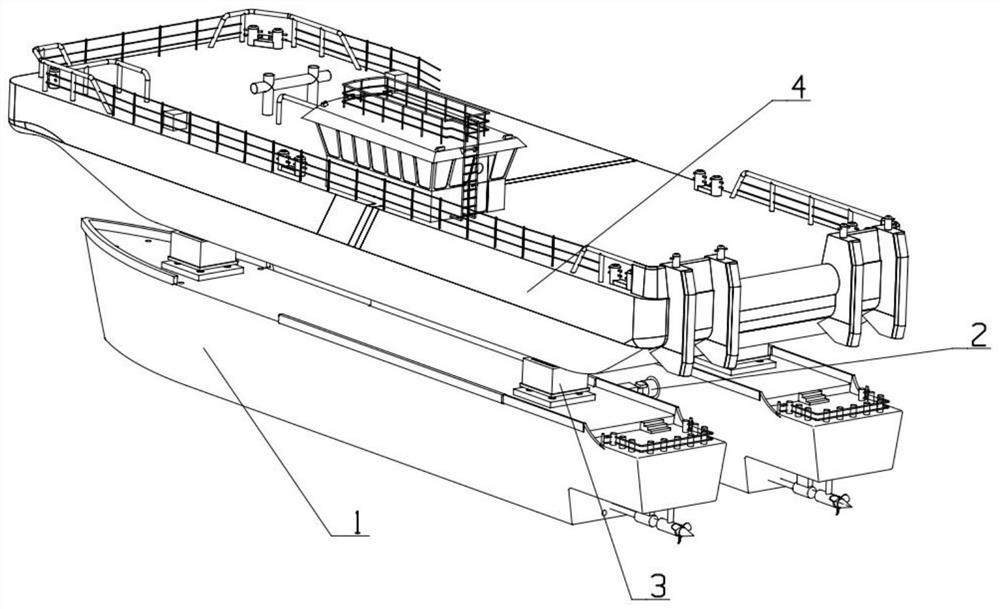
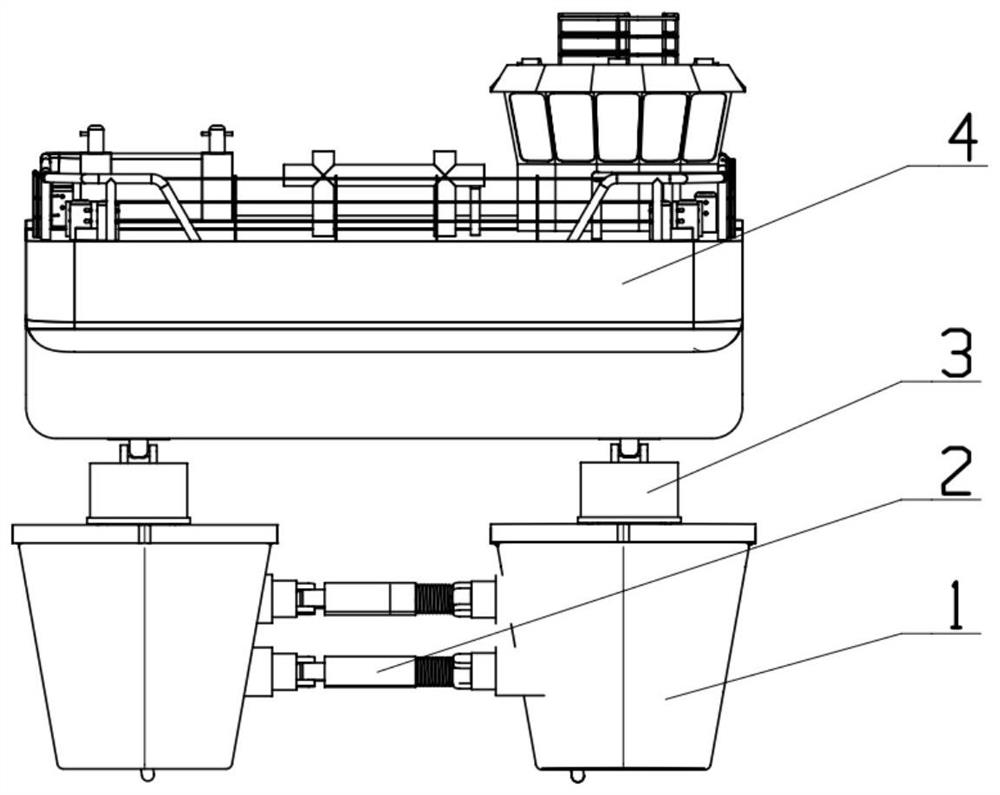
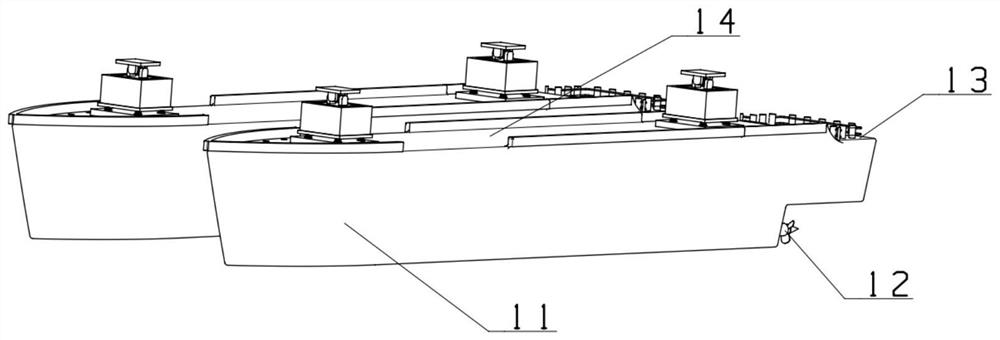
[0032] Such as figure 1 and figure 2 As shown, a wave compensating ship in this embodiment includes a ship-shaped main body 1 for navigation, a buffer connection device 2 , a compensation device 3 and a deck platform 4 arranged above the ship-shaped main body 1 . The ship type main body 1 comprises several hull units 11, and the hull unit 11 comprises a power room, an operating room, a fuel storage room and a power unit 12, and each hull unit 11 is provided with a power unit 12, and the power unit 12 is used to drive the hull unit 11 to sail, such as image 3 As shown, the upper surface of the hull unit 11 is provided with a rear side deck 13 and a compensating support deck 14, and the rear side deck 13 is provided with a channel, and the channel communicates with the compensating support deck 14 and the inside of the hull unit 11. In this embodiment, two hull units 11 arranged side by side are arranged, and two buffer connection devices 2 are arranged between the two hull u...
Embodiment 2
[0038] The wave compensating ship in the above-mentioned embodiment 1 is provided with an attitude sensor on the hull unit 11, and each second servo cylinder is provided with a linear displacement sensor. The ship receives the data from the sensor through the motion controller and performs calculations, and according to the calculation As a result, the compensation device is controlled, and the compensation method for the above-mentioned wave compensation ship specifically includes the following steps:
[0039] Step 1: The motion controller receives the attitude sensor in real time to measure the attitude values of the rolling motion, pitching motion, and heave motion of the hull unit respectively; in this embodiment, the measured rolling motion attitude values of the two hull units are respectively are a1 and a2, the measured pitch motion attitude values of the two hull units are b1 and b2 respectively, and the measured heave motion attitude values of the two hull unit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com