Auxiliary welding device of crawling welding robot, control method and welding method of auxiliary welding device
A technology for welding robots and crawling robots, applied in auxiliary devices, auxiliary welding equipment, welding/cutting auxiliary equipment, etc., can solve the problem of undetermined safety rope layout of crawling welding robots, difficult batch industrial application, and limited space for carrying equipment and other issues, to achieve the effect of fast and flexible on-site layout and implementation, unlimited space, and small footprint
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0064] The present invention will be described in further detail below in conjunction with accompanying drawing:
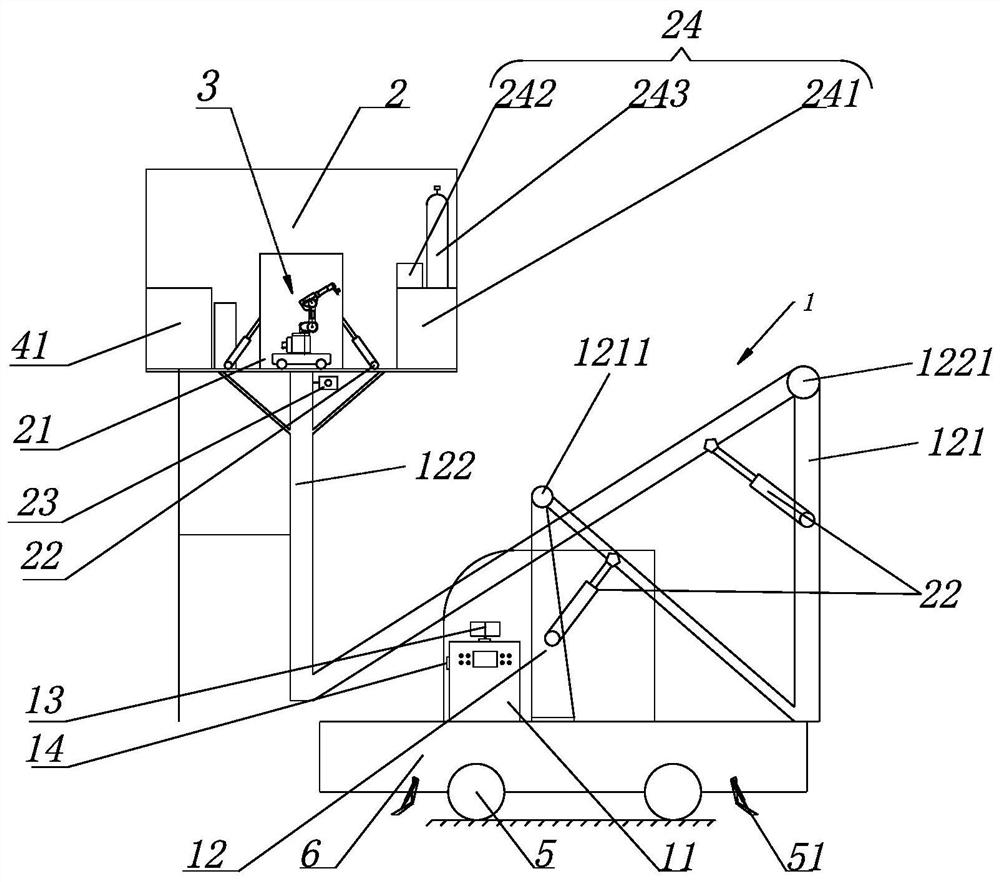
[0065] see figure 1 , figure 2 As shown, the auxiliary welding device for all-position crawling welding robots includes a 360° rotary hydraulic crank arm lifting mechanism assembly 1, an operation operation room 2 controlled by the articulation arm lifting mechanism assembly 1, and an operation operation room 2 The crawling welding robot 3 and the electric control equipment 4 of the whole machine are formed.
[0066] see figure 1 As shown, the crank arm lifting mechanism assembly 1 is composed of a combined master control console 11 and a crank arm lifting mechanism 12 arranged on the vehicle; the crank arm lifting mechanism adopts a three-section hydraulic folding working arm, and the terminal operation The operation room is rigidly connected with the three-section arm; the crank arm lifting mechanism 12 is composed of the welding operation arm 121 pivoted on...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com