Remote control robot for automatic driving test and control method therefor
A technology of automatic driving and robotics, which is applied in the direction of program control manipulators, instruments, manipulators, etc., can solve problems such as low efficiency, potential safety hazards, and inability to accurately reflect the recognition effect of real people, so as to improve safety factor, repeatability and measurability sex enhancing effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
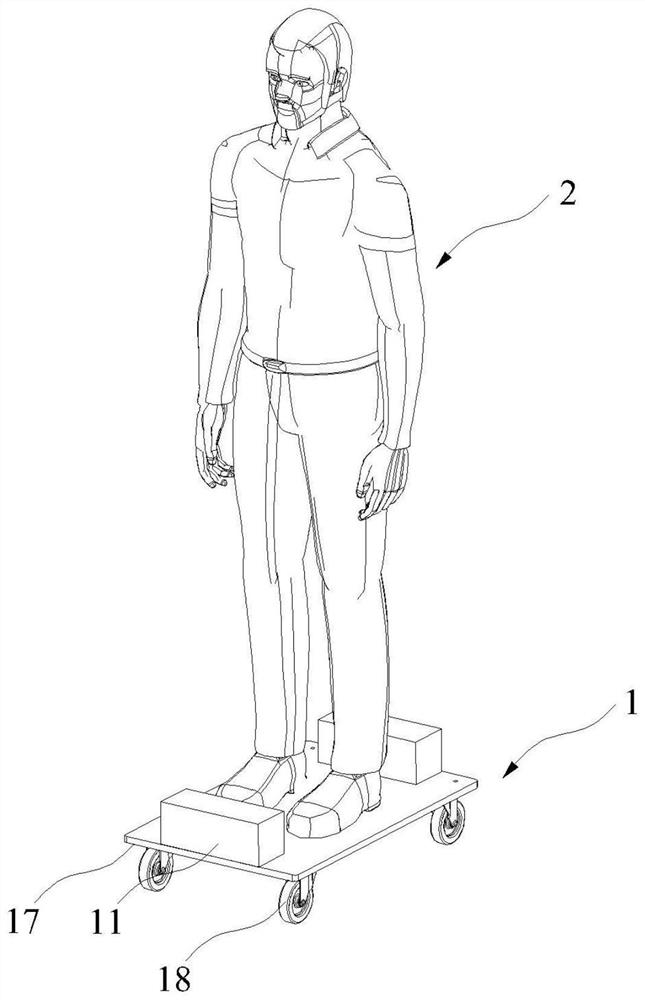
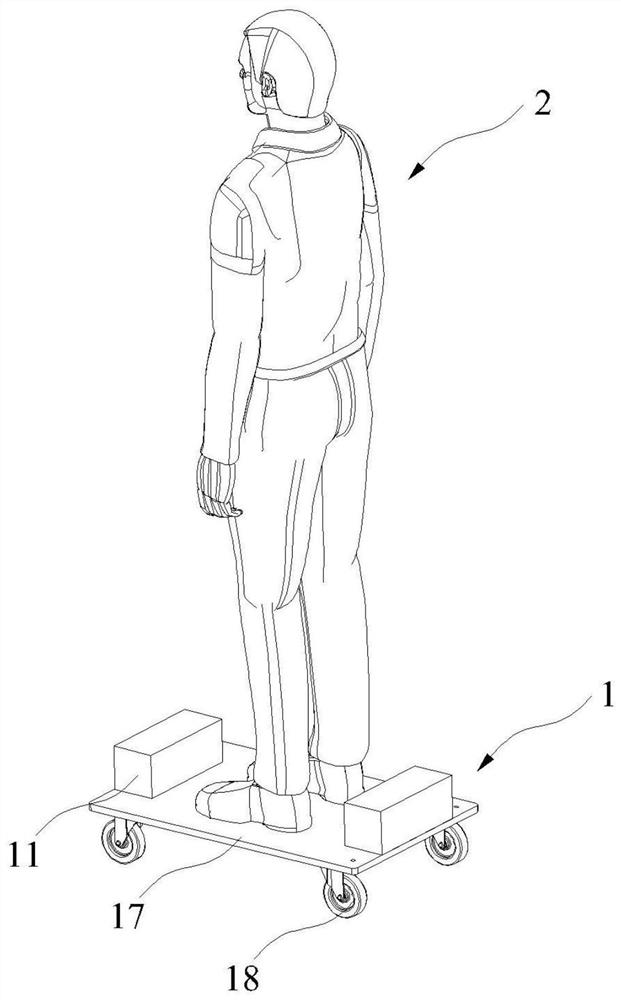
[0039] Such as Figure 1-3 As shown, the present invention discloses a remote control robot for automatic driving test, including a robot model 100 and a remote control 200;
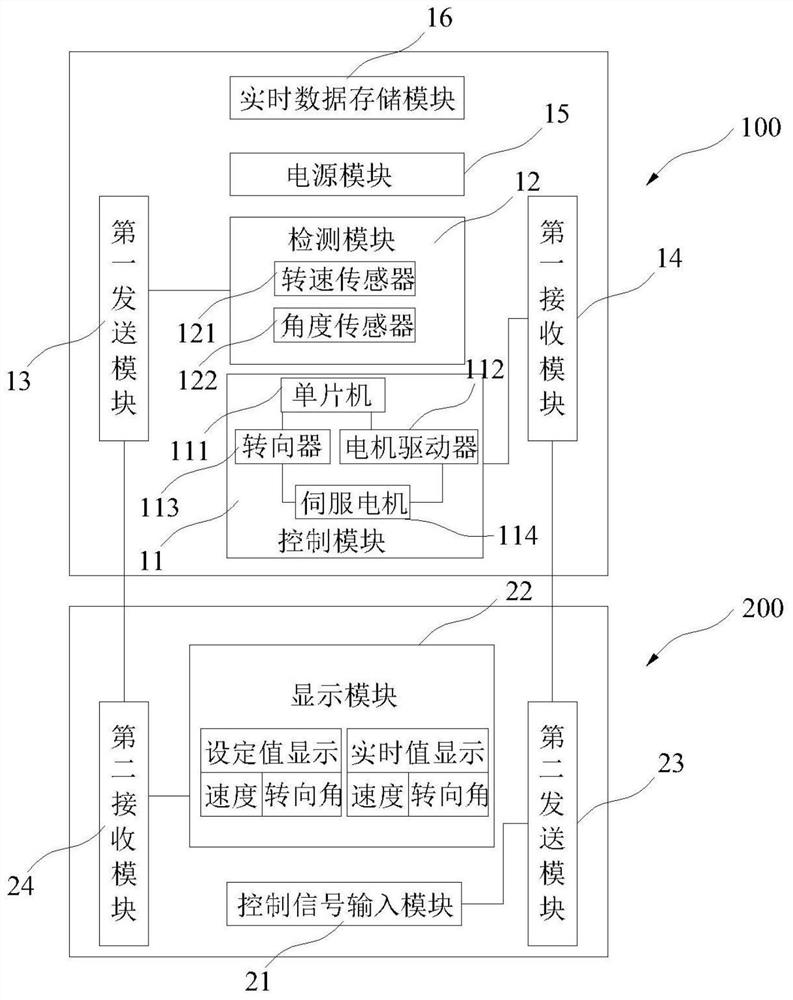
[0040] Above-mentioned robot model 100 is made up of dolly 1 and the figure mold 2 that is fixed on dolly 1, and described dolly 1 comprises control module 11, detection module 12, first sending module 13 and first receiving module 14; This control module 11 is used for According to the control instruction, the car 1 is controlled to start, stop, move forward, reverse, accelerate, decelerate and / or turn; The detection module 12 is connected, and the first receiving module 14 is connected to the control module 11; each part of the human-shaped mold 2 is covered with a copper foil 3 of a certain thickness and density;
[0041]The remote controller 200 includes a control signal input module 21, a display module 22, a second sending module 23 and a second receiving module 24, the control signal input module...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com