Smooth obstacle crossing walking mechanism
A traveling mechanism and smooth technology, applied in the direction of motor vehicles, vehicle parts, wheels that can support multiple tires, etc., can solve the problems of height change, sudden change in height, unsatisfactory performance, etc., and achieve the effect of avoiding sudden change in height
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The specific embodiments of the present invention will be described in detail below in conjunction with the technical solutions and accompanying drawings.
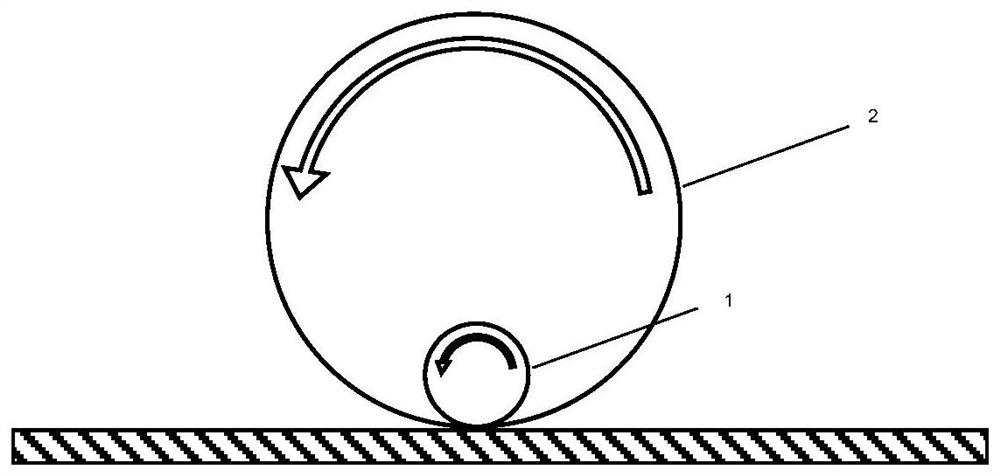
[0021] combine figure 1 , to illustrate specific embodiments of the present invention. Drive wheel 1 has a smaller wheel diameter, and contact wheel 2 has a larger wheel diameter. Drive wheel 1 can rotate around its own axis under the action of driving force. The wheel 2 is in contact with the ground. When the driving wheel 1 actively rotates, under the action of friction with the contact wheel 2, it walks along the inner edge of the contact wheel 2. The contact wheel 2 is under the pressure and friction of the driving wheel 1. Roll forward to realize the walking of the smooth obstacle-crossing walking mechanism.
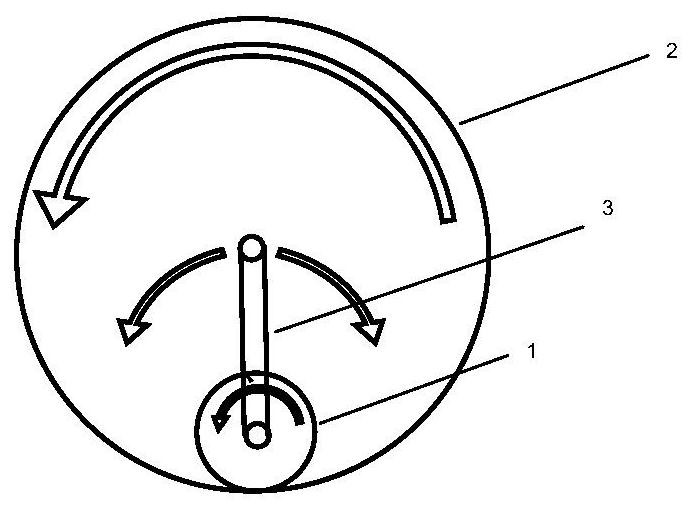
[0022] combine image 3 , to illustrate specific embodiments of the present invention. The shaft of the driving wheel 1 and the shaft of the contact wheel 2 are connected and fixed by the connecting p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com