


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Driverless automobile accelerator control device
A driverless car, throttle control technology, applied in the layout of the power unit control mechanism, vehicle components, transportation and packaging, etc., can solve problems such as interference with the central control system, faults, large worm gear compounding, etc., to ensure the operation effect Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
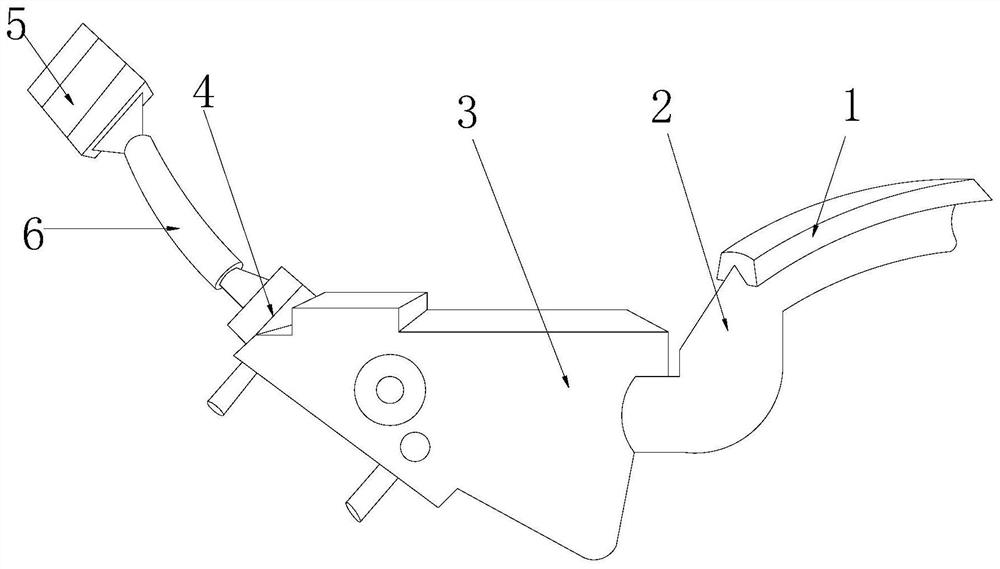
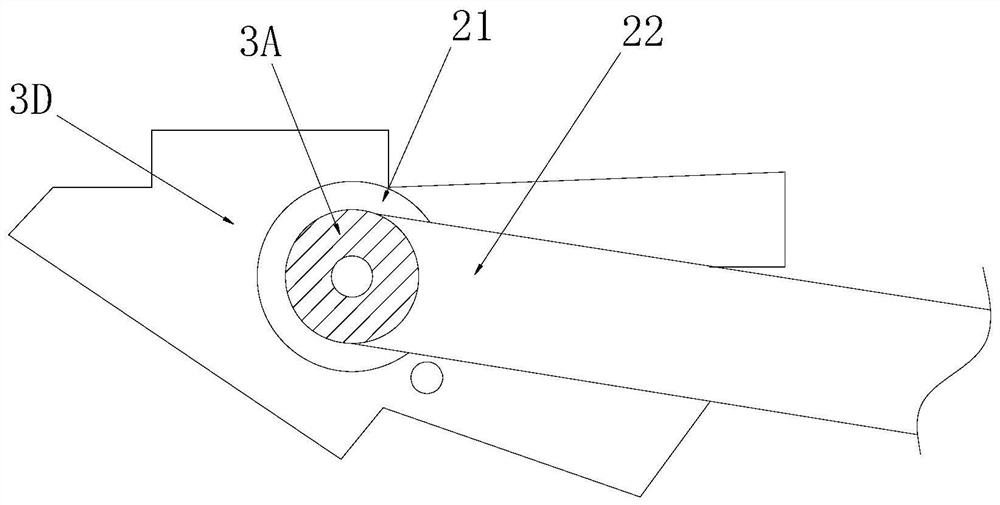
[0031] Such as Figure 1-Figure 8 As shown, the present invention provides an accelerator control device for unmanned vehicles, its structure includes: accelerator pedal 1, linkage pressure bar 2, gear position relay wheel seat 3, contact electric board seat 4, parallel plug slot 5, The wire harness sleeve 6, the gear relay wheel seat 3 is mechanically connected with the linkage pressure rod 2 and is on the same vertical plane, the accelerator pedal 1 is nested at one end of the linkage pressure rod 2 and is perpendicular to each other, the The gear relay wheel seat 3 is electrically connected with the contact electric board seat 4 and is on the same vertical plane. The contact electric board seat 4 is electrically connected with the parallel plug slot 5 through the wire harness casing 6. The gear The position relay wheel base 3 is provided with a fifth-gear wheel brush groove 3A, a damping pad frame 3B, an ellipsoid gasket 3C, and an accelerator seat shell groove 3D, and the ...
Embodiment 2
[0039] Such as Figure 1-Figure 8 As shown, the present invention provides a kind of accelerator control device for unmanned vehicles, and other aspects are the same as embodiment 1, and the difference is:
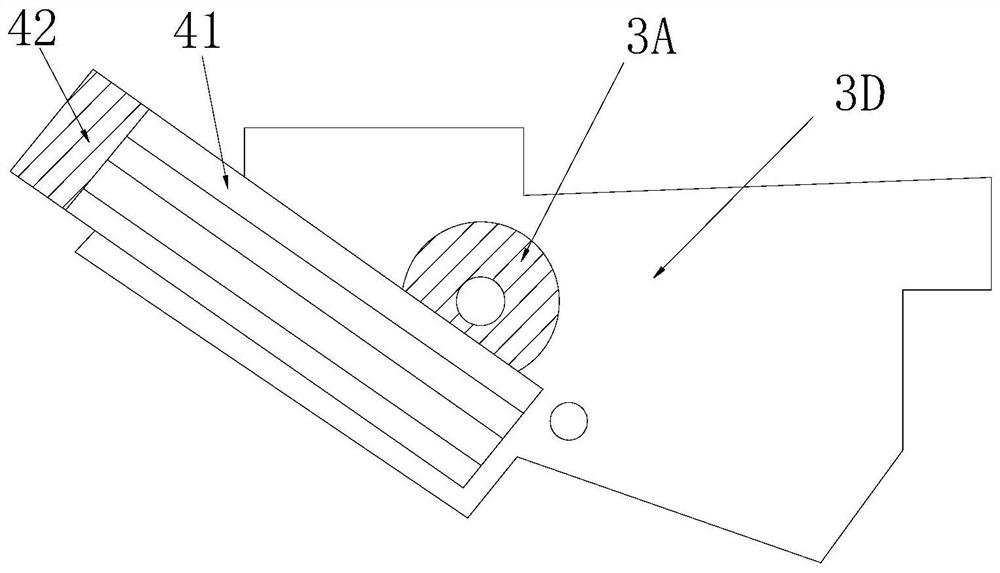
[0040] Such as image 3 As shown, the contact electric board seat 4 includes: a contact electric board 41 and a branching sleeve cap 42, the contact electric board 41 is installed under the bottom of the branching sleeve cap 42 and is on the same slope, the The contact plate 41 is nested together with the branching cap 42, and the four-position tap operation effect is formed at the bottom of the branching cap 42 through the contact plate 41, ensuring that the four gears after the reserved space are gradually increased in speed The effect of electric signal docking operation.
[0041] Such as Figure 6 As shown, the contact electric board 41 includes: a three-phase contact plate seat 411 and an integrated strip 412, the three-phase contact plate seat 411 is installed ins...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com