A nonlinear current simulation and robust control method for a motor simulator
A non-linear current and motor simulation technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., it can solve the problems of parameter drift, high requirements, and inability to guarantee the system, so as to improve the dynamic response speed and reduce the speed. The effect of debugging workload
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The application of the present invention to a motor simulator will be further described below with reference to the embodiments shown in the accompanying drawings, so as to help those skilled in the art to further understand the present invention.
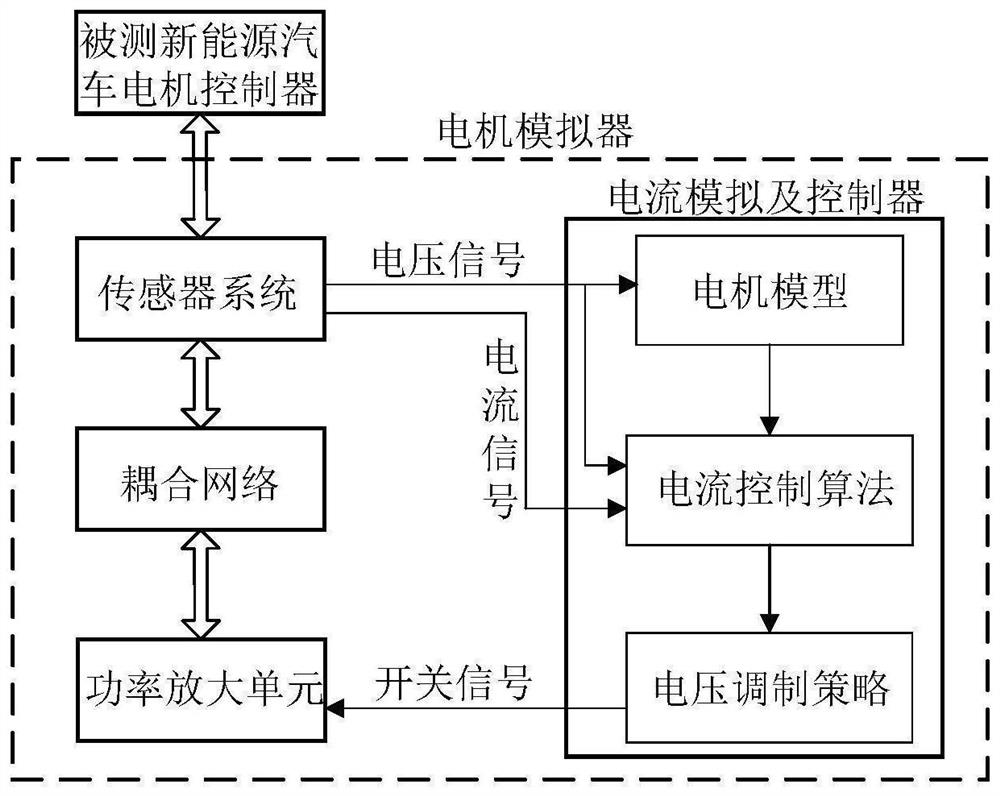
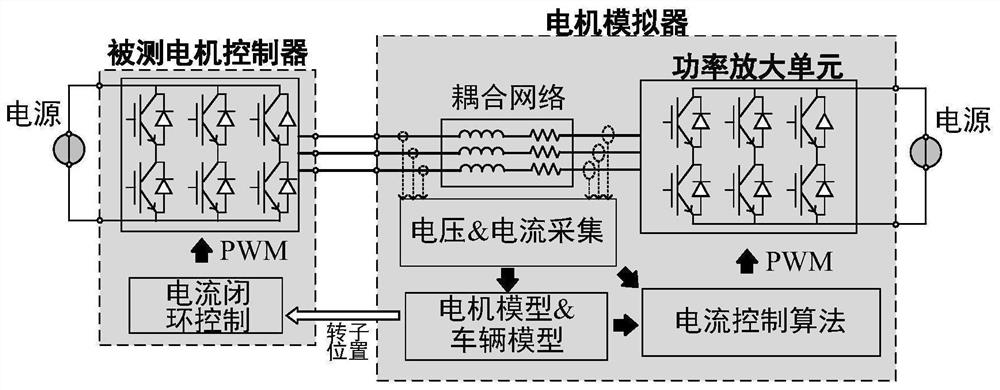
[0034] figure 1 It is a functional structure diagram of the motor simulator in the present invention. The motor simulator includes a sensor system, a coupling unit, a power amplifying unit, a current simulation and a controller. The current simulation and the controller run in a high-speed FPGA processor, which includes a motor model, There are three parts: current control algorithm and voltage modulation strategy. The sensor system performs high-speed real-time acquisition of the phase voltage and current output by the motor controller under test. The current simulation and controller are based on the high-speed real-time calculation of the internal motor model and circuit control algorithm. The high-frequency switching con...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com