


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Three-dimensional building fine geometric reconstruction method integrating airborne and vehicle-mounted three-dimensional laser point clouds and streetscape images
A 3D laser and building technology, used in 3D modeling, mechanical equipment, combustion engines, etc., can solve the problems of density, occlusion, classifier performance, and few attempts to classify outdoor point clouds.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
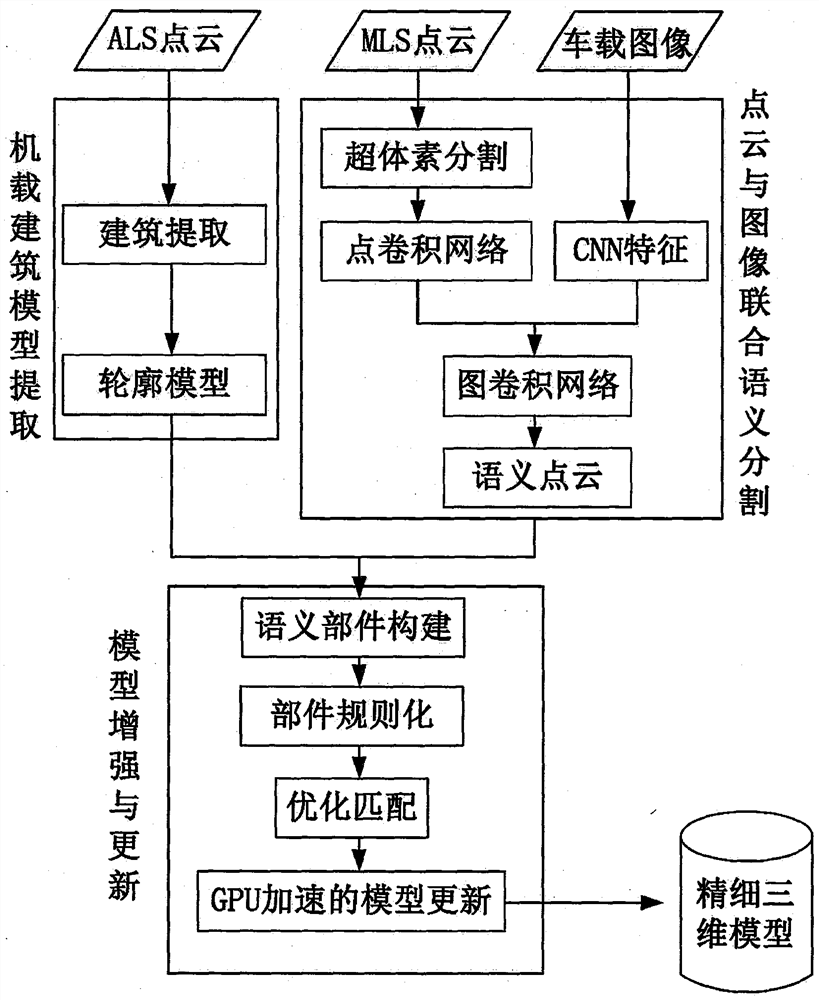
[0031] The overall research train of thought of the present invention is as figure 1 As shown, it contains three modules: airborne building model extraction, point cloud and image joint semantic segmentation, model enhancement and update. The basic input data of this research is the airborne lidar point cloud, the vehicle lidar point cloud and the corresponding vehicle image or matching street view image. In the on-board building model extraction module, the buildings in the point cloud will be identified first and used to build a rough building outline model. In the semantic segmentation module, the geometric information contained in the vehicle point cloud will be fused with the color texture and topological information contained in the image, so as to improve the semantic segmentation accuracy of the point cloud. Based on this, the task of the third module is to integrate the architecturally relevant semantic point cloud and the rough outline model produced onboard to incr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com