Robot vision SLAM closed-loop detection method based on stack type combined auto-encoder
A technology of robot vision and autoencoder, which is applied in the direction of neural learning methods, instruments, computer parts, etc., can solve the problems of dimension explosion and easy loss of network features, achieve good accuracy, improve accuracy and robustness , The effect of good feature robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0048] The technical solutions in the embodiments of the present invention will be described clearly and in detail below with reference to the drawings in the embodiments of the present invention. The described embodiments are only some of the embodiments of the invention.
[0049] The technical scheme that the present invention solves the problems of the technologies described above is:
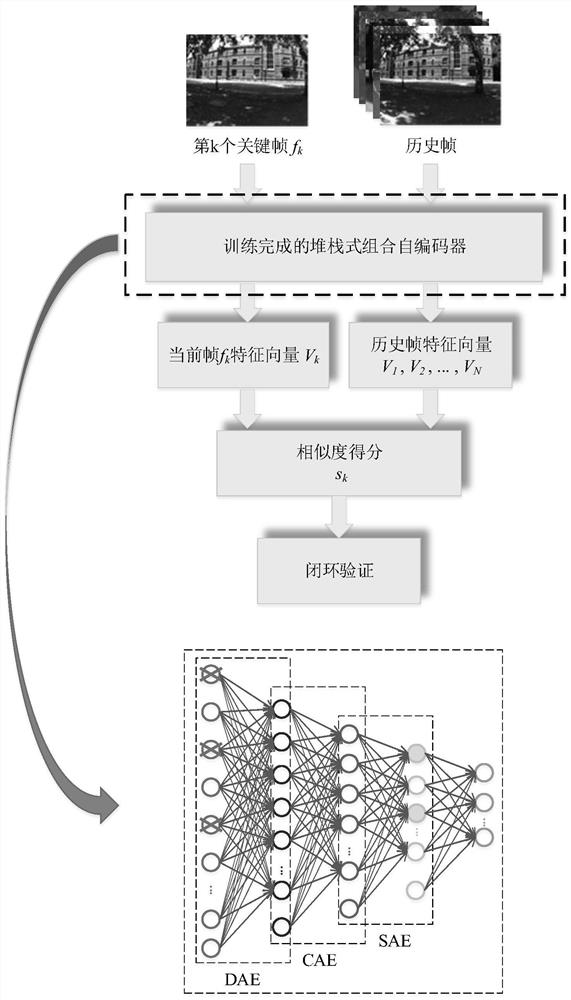
[0050] Aiming at the deficiencies of the existing technology, a stacked combined autoencoder composed of multi-layer stacking of noise reduction autoencoder, convolutional autoencoder and sparse autoencoder is designed to extract the features of the scene image, and then Use the output features for loop closure detection. This network model based on unsupervised learning has excellent performance in terms of generalization ability and robustness, effectively improving the accuracy and robustness of closed-loop detection, and the data set used during training does not need to carry labels, r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com