Lorentz inertial stabilization platform friction recognition and compensation control method
An inertial stable platform, Lorentz inertial technology, applied in attitude control and other directions, can solve the problems of reducing friction, affecting the stability accuracy of platform startup, and the radial speed of mover crossing zero, so as to achieve the effect of improving stability accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
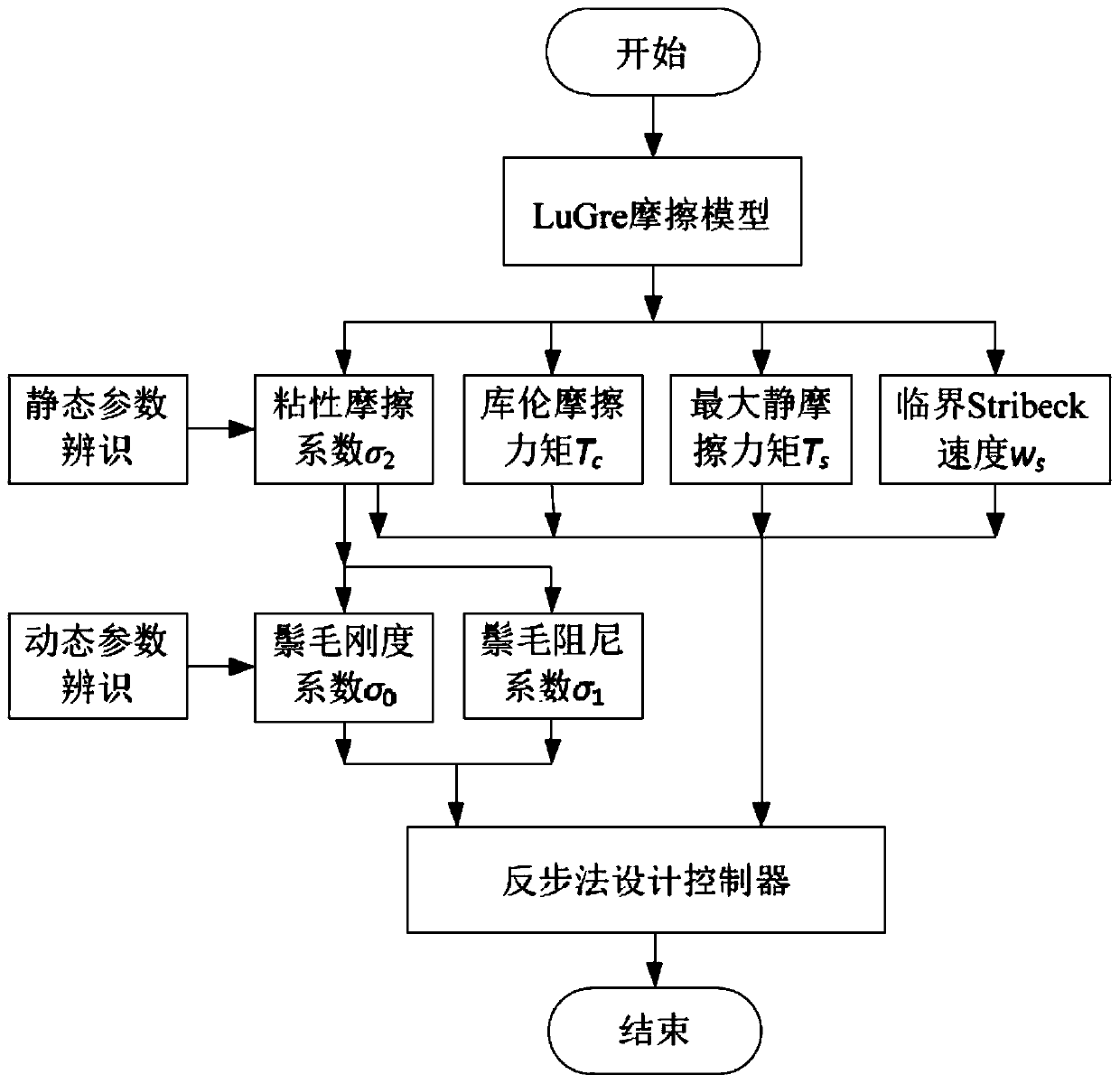
[0078] Such as figure 1 As shown, in the specific implementation process, the specific implementation steps of the present invention are as follows:
[0079] 1. Aiming at the problem of non-linear friction between the bearing and the stator, a LuGre friction model is established:
[0080]
[0081] Among them, θ is the deflection angle of the mover, z is the deformation of the mane, and the four static parameters T c , T s 、w s and σ 2 are the Coulomb friction torque, the maximum static friction torque, the critical Stribeck velocity and the viscous friction coefficient respectively, and the two dynamic parameters σ 0 and σ 1 are the bristle stiffness coefficient and bristle damping coefficient respectively, T f is the total friction torque.
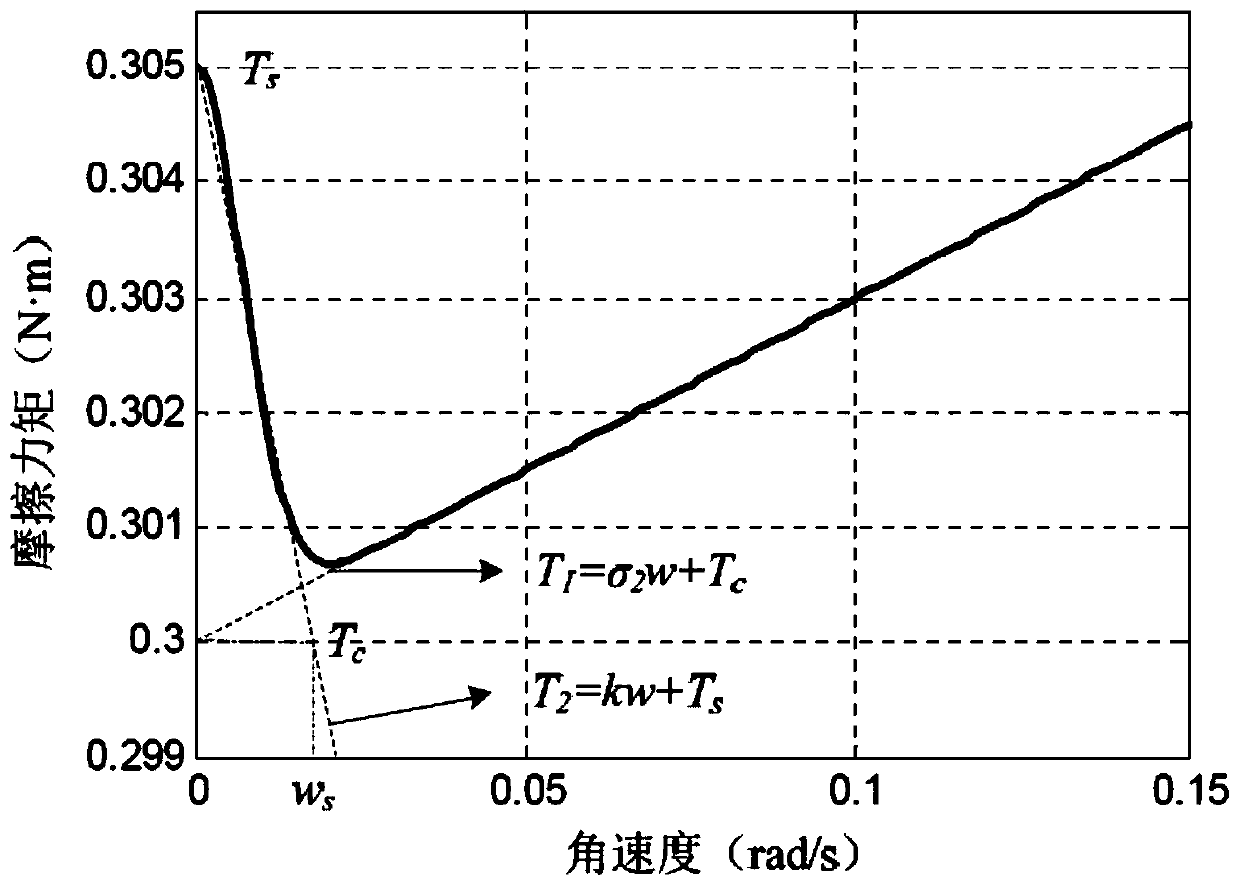
[0082] 2. Identify static parameters:
[0083] According to the law of conservation of angular momentum, under the state of uniform deflection of the platform mover, the resulting torque is zero, that is, the torque output by t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com