System and a method for realizing realness of forklift simulation driving
A technology for simulating driving and implementing methods, applied in simulators, simulation devices and instruments of space navigation conditions, etc., can solve problems such as inability to achieve dynamic simulation, poor system stability, inability to achieve pitch and roll simulation, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0100] specific implementation plan
[0101] Embodiments of the invention are described in detail below, examples of which are illustrated in the accompanying drawings. The embodiments described below by referring to the figures are exemplary and are intended to explain the present invention and should not be construed as limiting the present invention.
[0102] A system for realizing real somatosensory driving of a forklift simulated driving according to the present invention comprises a hardware platform and a software module.
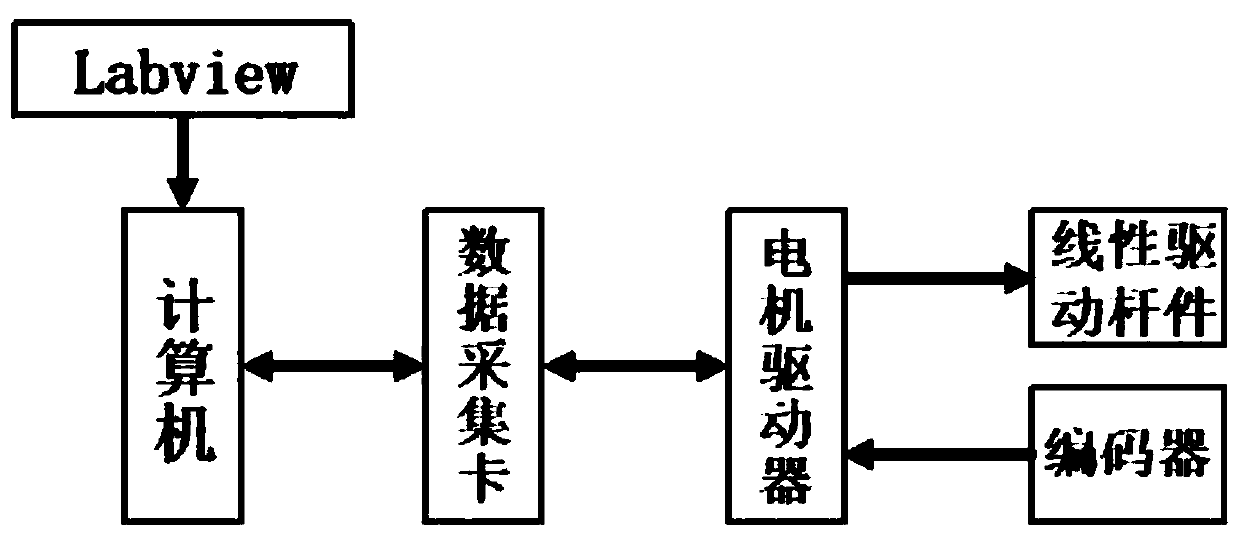
[0103] Such as figure 1 As shown, a kind of forklift simulation driving real somatosensory realization system according to the present invention, its hardware platform includes moving platform 1, fixed platform 2, three linear drive rods 3, servo motor 4, servo motor driver 5.
[0104] Further, the moving platform 1 is connected with three linear drive rods 3 through a ball joint pair, and the upper surface is connected with the seat for outputting...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com