


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
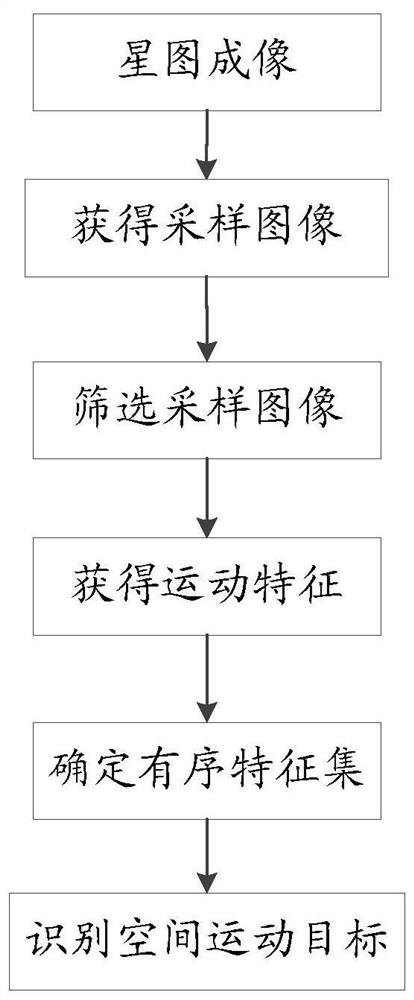
A high-efficiency dim space target recognition method
A space target and recognition method technology, applied in the field of high-efficiency dim space target recognition, can solve problems such as prone to misidentification, low extraction speed, and large dependence on prior information, achieving fewer redundant steps, high efficiency, and multiple types Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
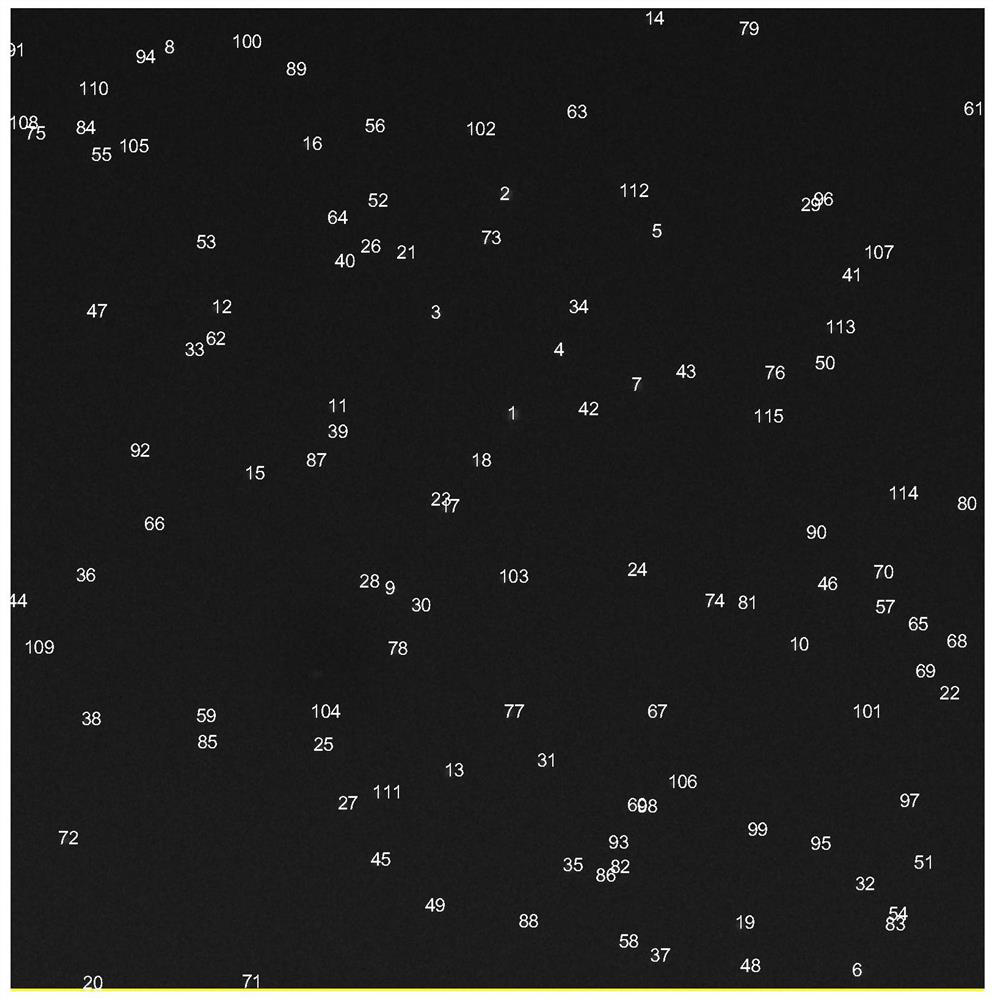
[0058] (1) Take a star map and complete star point extraction. First estimate the background gray level, and then use the eight-connected domain algorithm to judge the cluster points satisfying the number of image points greater than 4 as bright spots, and complete the star point extraction. The obtained results are as follows figure 2 shown. The background gray level adopts the regional background prediction method, and the threshold calculation formula is:
[0059]
[0060]
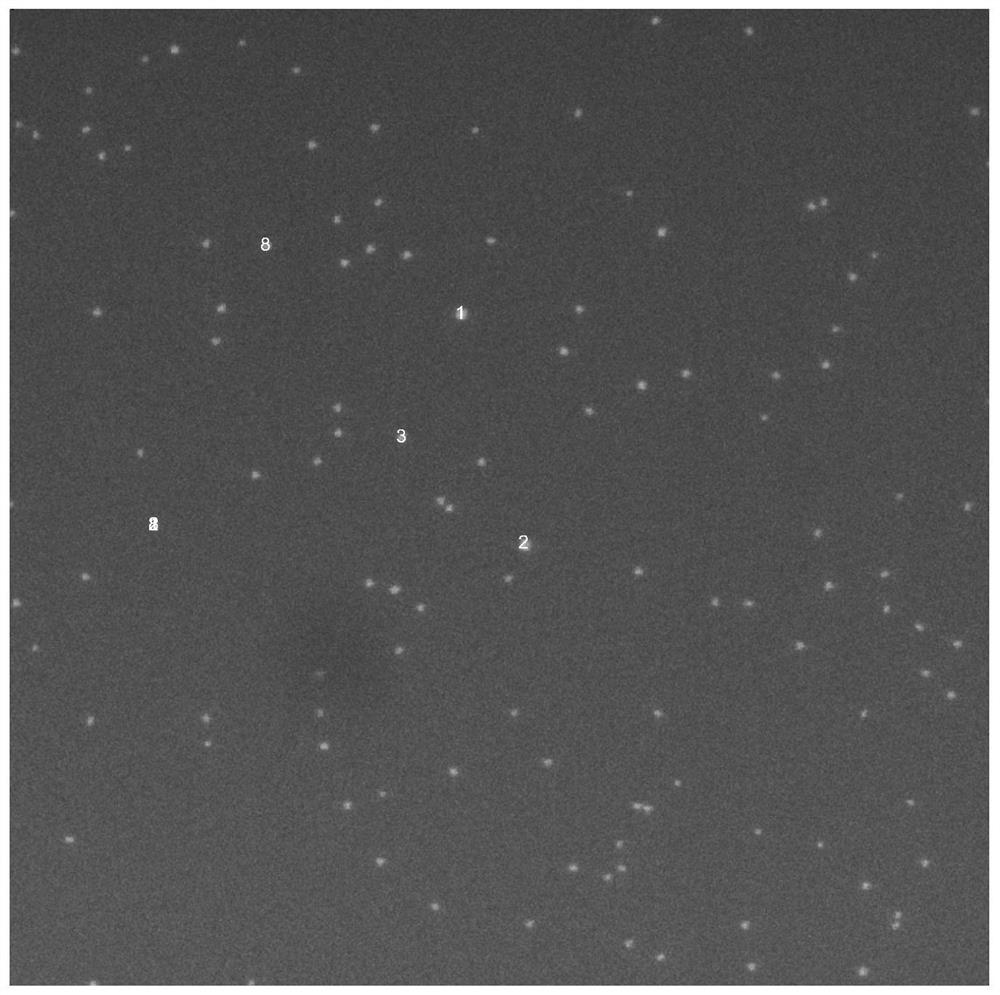
[0061] (2) Eliminate star points. By comparing with the star catalog and eliminating stars, and eliminating the influence of elements such as fixed bad pixels and thermal noise, a queue of suspicious space targets is established. For the suspected targets, see image 3 ;
[0062] (3) For known moving targets, use the target tracking method to judge whether the bright spots in the queue of suspicious space targets are targets, and the obtained moving targets can be found in Figure 4 . In thi...
Embodiment 2
[0069] Embodiment 2 is the same as Example 1, except that step (2) is the multi-frame elimination method of the present invention, and step (3) is that the tracking method adopts the image plane coordinate prediction method. According to the stability characteristics of stars in the inertial system, all useless background stars are eliminated by frame-to-frame comparison. For the implementation method, see Figure 6 . Compared with the previous method, more background stars can be removed. The tracking method adopts the image plane coordinate prediction method, assuming that the position coordinate of the target is X=(u,v), then the prediction method is:
[0070] u=μ u (t-t 0 )+u 0 , v=μ v (t-t 0 )+v 0 ,
[0071] Thus, the position of the target in the image frame is obtained, and the target is extracted. Compared with the aforementioned method, the extraction of the target position is more direct and accurate.
Embodiment 3
[0073] Embodiment 3 is the same as Example 1, except that the different step (3) is to adopt the authentication method of the present invention, which classifies by calculating the target motion speed, size, and motion feature set, determines to contain several types of targets, and judges the corresponding elements in the suspected queue. What kind of space movement target. The implementation steps are as follows:
[0074] 1) Calculate the motion velocity of blocky bright spots in the inertial space in the suspected target queue of each frame, remove all matching star pairs whose velocity is greater than the upper threshold (0.2 degrees), and obtain all motion velocity information after iteratively processing multi-frame information;
[0075] 2) Count all the motion features, calculate the motion ordered feature set based on the frequency, and select the motion feature set with the smallest comprehensive rate as the final A-type ordered feature set. For the diagram, see Fig...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com