Real-time detection of lanes and boundaries by autonomous vehicles
A lane and vehicle technology, applied in vehicle position/route/height control, character and pattern recognition, non-electric variable control, etc., can solve problems such as inability to run effectively in real time, high computational cost, and accuracy limited to ideals
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
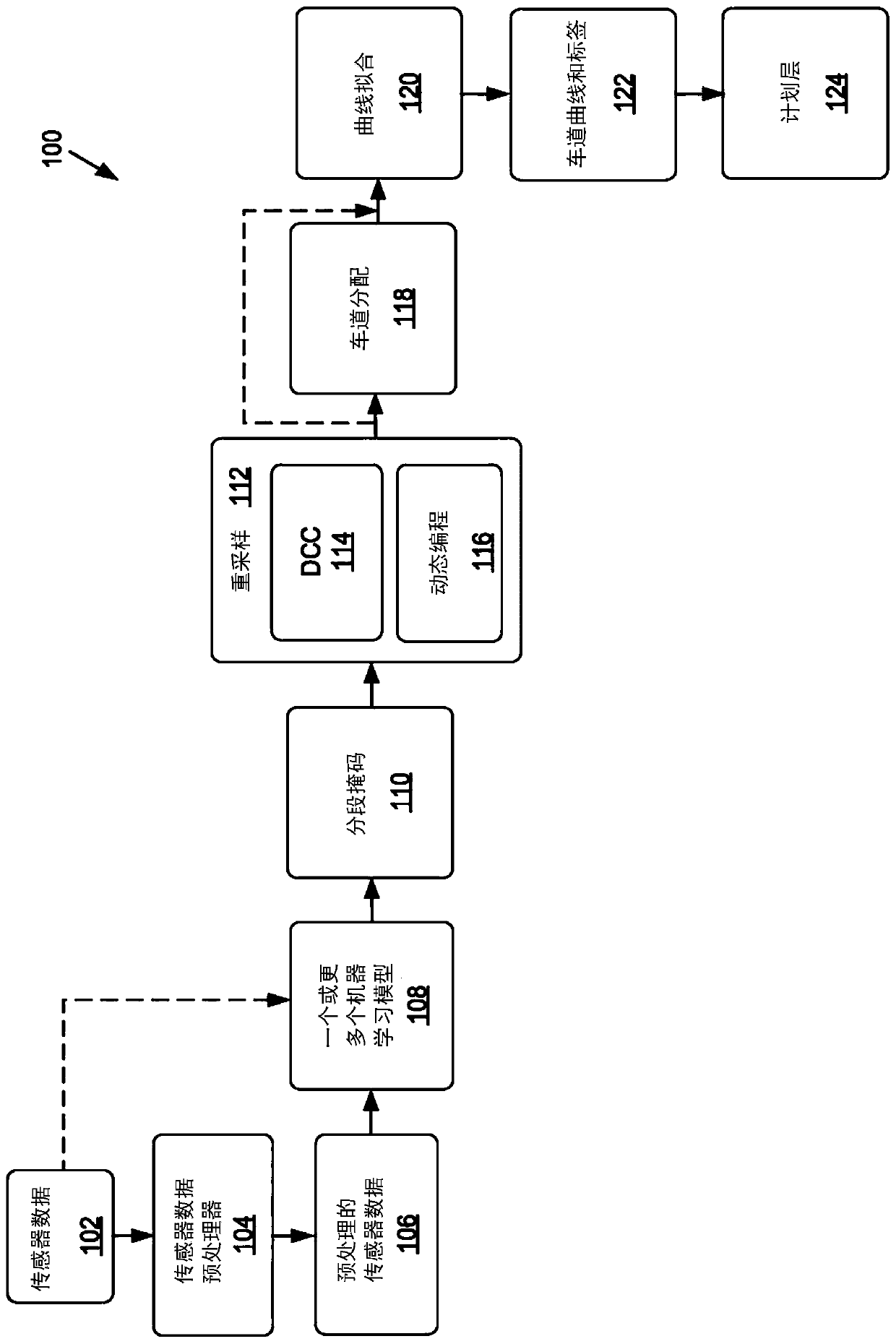
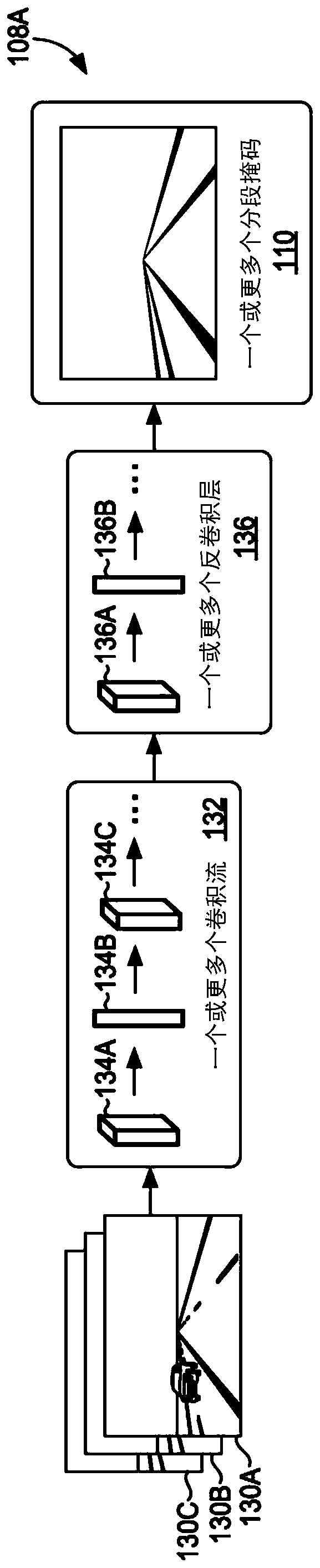
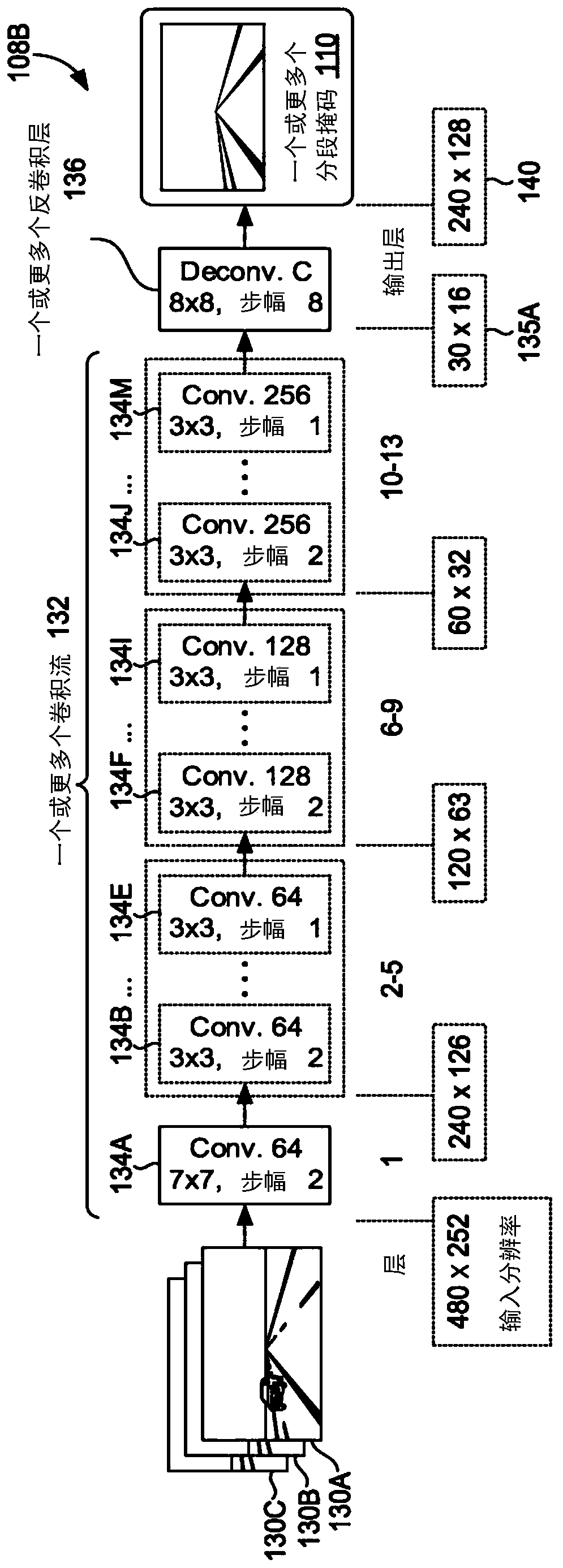
[0033] Systems and methods related to real-time detection of lane and road boundaries by autonomous vehicles and / or advanced driver assistance systems (ADAS) using one or more machine learning models are disclosed. The present disclosure may be described with reference to an exemplary autonomous vehicle 800 (alternatively referred to herein as "vehicle 800" or "autonomous vehicle 800"), examples of which are referenced herein Figures 8A-8D describe. However, this is not meant to be limiting. For example, the systems and methods described herein may be used in augmented reality, virtual reality, robotics, and / or other technical fields, such as for positioning, calibration, and / or other processes. Furthermore, although the detections described herein primarily relate to lanes, road boundaries, lane splits, lane merges, intersections, crosswalks, etc., the present disclosure is not intended to be limited to these detections. For example, the processes described herein can be u...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap