Independent drive and independent turning robot secondary adjusting hydraulic moving platform
A technology of independent steering and secondary adjustment, applied in steering mechanism, brake, non-deflectable wheel steering, etc., can solve the problems of insufficient off-road maneuverability and carrying capacity, low moving speed, poor universality, etc., and achieve flexible steering. , strong traction capacity, the effect of reducing installed power
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
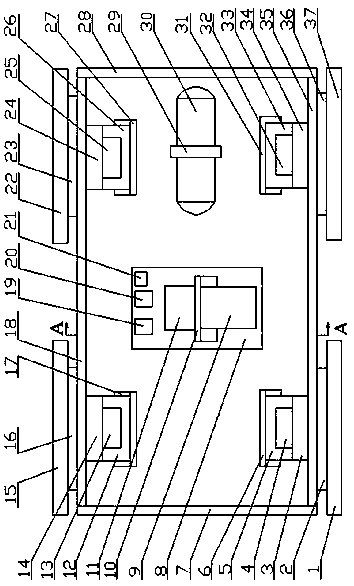
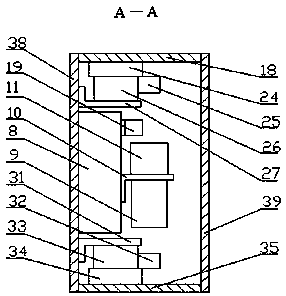
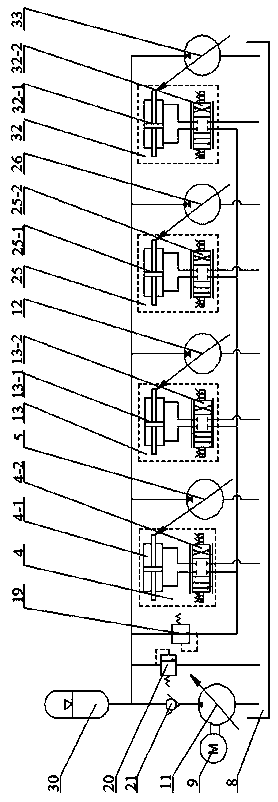
[0024] Attached below figure 1 , 2 , 3 and Examples further illustrate the present invention.
[0025] Such as figure 1 , 2 3, the present invention includes left front wheel 1, left front electromagnetic brake 2, left front reducer 3, left front variable device 4, left front secondary element 5, left front secondary element support 6, front baffle 7, fuel tank 8, motor 9. Motor support 10, variable pump 11, right front secondary element 12, right front variable device 13, right front reducer 14, right front wheel 15, right front electromagnetic brake 16, right front secondary element support 17, right side plate 18, reducer Pressure valve 19, overflow valve 20, check valve 21, right rear wheel 22, right rear electromagnetic brake 23, right rear reducer 24, right rear variable device 25, right rear secondary element 26, right rear secondary element support Seat 27, tailgate 28, accumulator support 29, accumulator 30, left rear secondary element support 31, left rear variable devi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com