Orthogonal piezoelectric joint mechanism and control method thereof
A joint and piezoelectric technology, applied in the field of manipulators, can solve the problems of large size, difficult miniaturization, and low power density of manipulators, and achieve the effects of small size, miniaturized design, and high power density.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
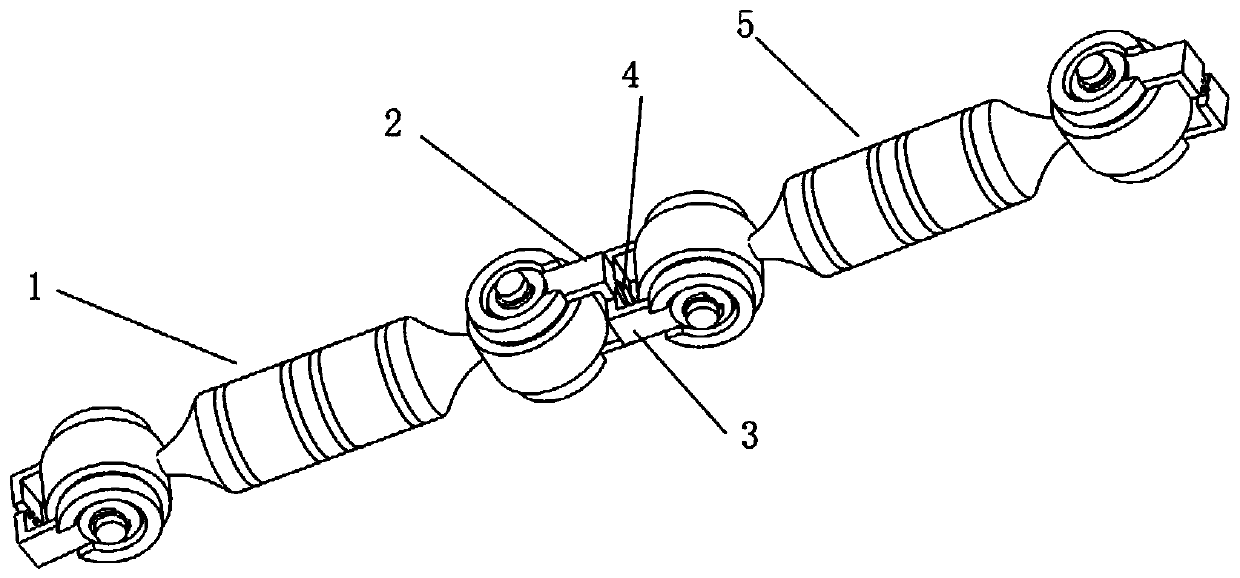
[0034] Such as figure 1 As shown, an orthogonal piezoelectric joint mechanism includes several single-stator orthogonal double-loop two-degree-of-freedom piezoelectric actuators connected in sequence; Taking the piezoelectric joint mechanism as an example, the two piezoelectric actuators included are the first piezoelectric actuator 1 and the second piezoelectric actuator 5 respectively.
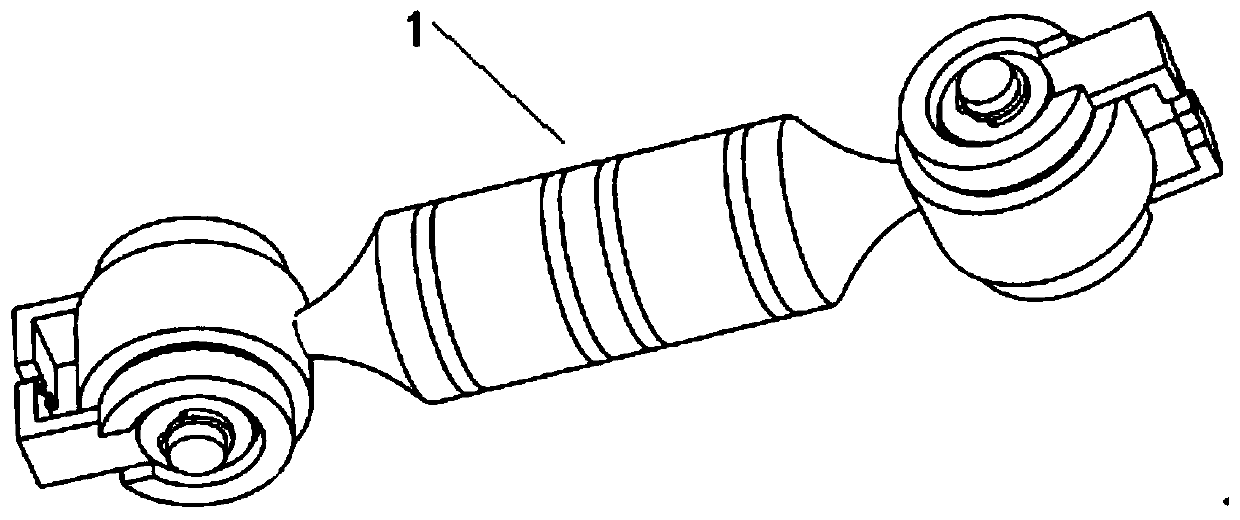
[0035] Such as figure 2 As shown, the single-stator orthogonal double-ring two-degree-of-freedom piezoelectric actuator includes a piezoelectric vibrator, a conical rotor 8 and a connecting assembly.
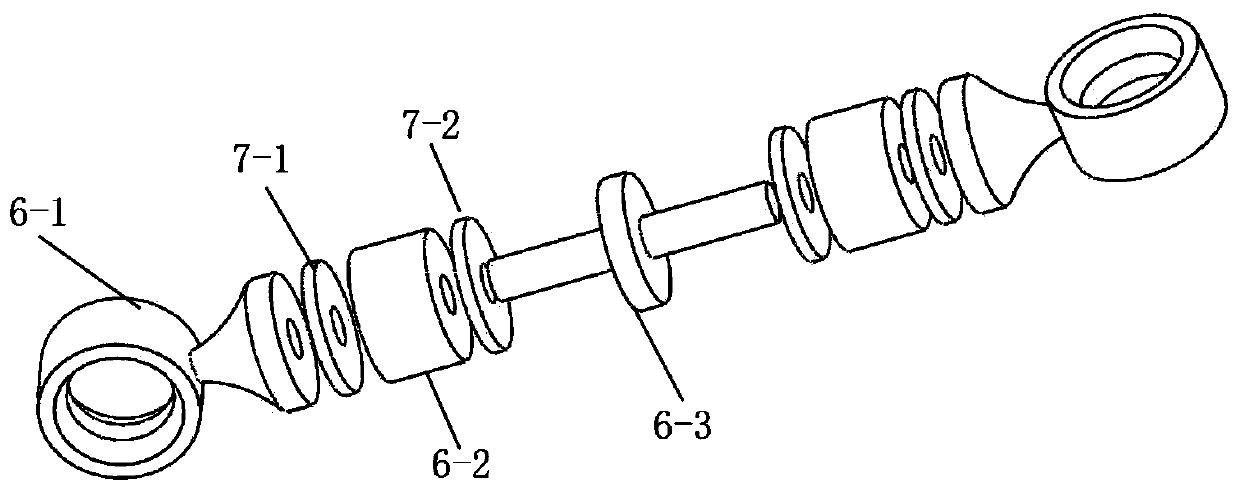
[0036] Such as image 3 As shown, the piezoelectric vibrator includes five metal substrates and four piezoelectric ceramic sheets. The gold base includes two first metal bases 6-1 located at both ends of the piezoelectric vibrator, a third metal base 6-3 located in the middle of the piezoelectric vibrator, and two second metal bases located on both sides of the third metal base. 6-2, that...
Embodiment 2
[0050] The invention also discloses a method for controlling and driving an orthogonal piezoelectric joint mechanism, which includes the following steps:
[0051] For each single-stator orthogonal double-loop two-degree-of-freedom piezoelectric actuator, by applying two sets of simple harmonic drive signals with a specific frequency and a phase difference of π / 2 to one end of the bending vibration piezoelectric ceramic piece and the longitudinal vibration piezoelectric ceramic piece, Excite the first-order longitudinal vibration mode and the second-order bending vibration mode of the piezoelectric vibrator. The two modes are of the same type and have a phase difference of π / 2 in time and space. The coupling of the two modes forms a rotational motion. The wave makes the particle inside the ring structure of the piezoelectric vibrator produce a slight elliptical motion, and drives the rotor and the connecting component to rotate through friction, thereby driving the movement of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com