An evaluation method for intelligent ground-air heterogeneous multi-robot performance evaluation system
A multi-robot and evaluation system technology, applied to control/regulation systems, instruments, two-dimensional position/channel control, etc., can solve problems such as limited search and rescue environment, lack of automatic judgment and search and rescue, and ineffective search and rescue effects. To achieve the effect of improving the efficiency of search and rescue
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
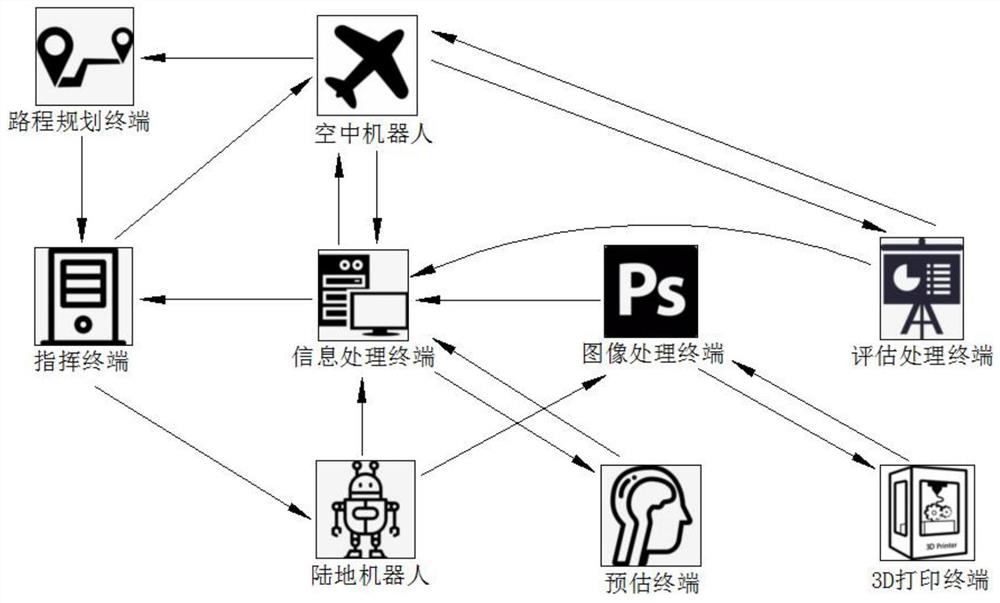
[0050] An evaluation method for an intelligent ground-air heterogeneous multi-robot performance evaluation system: the evaluation method also includes the following steps:
[0051] The land robot carries an amplitude sensor and a No. 1 camera; the amplitude sensor detects in real time the amplitude data of the land robot itself during the search and rescue process; the No. 1 camera is an analog camera with 20 million pixels, And take real-time shots of the scene in front of the land robot during the search and rescue process;
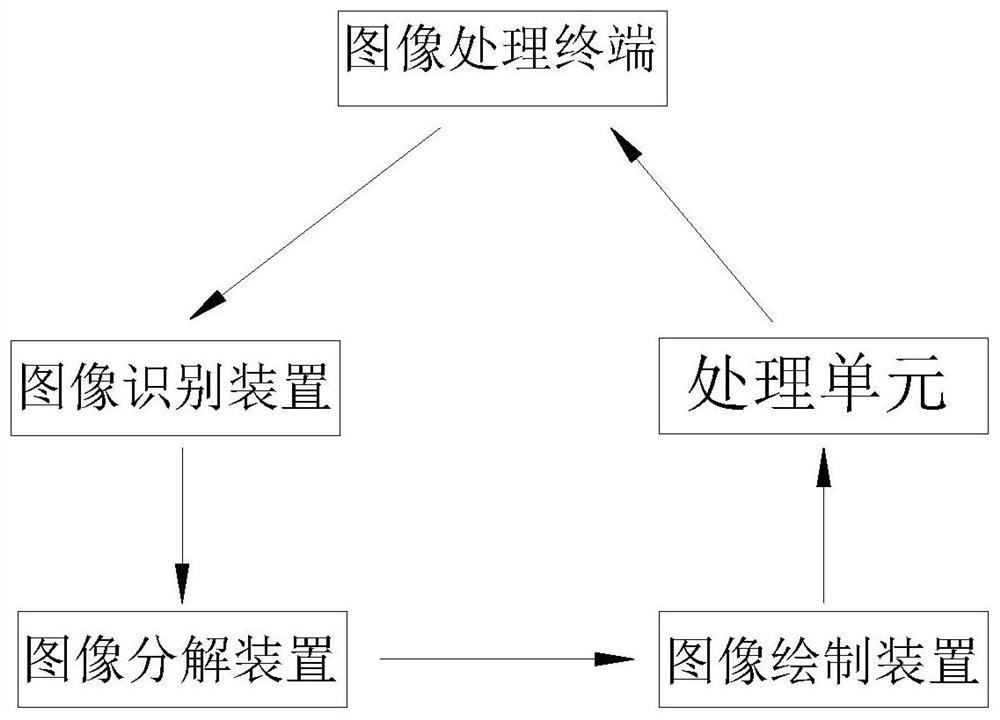
[0052] The image processing terminal is connected to the No. 1 camera to receive the scene in front of the land robot, and performs analog-to-digital conversion on the scene in front of the land robot to generate a digital scene in front of the land robot;
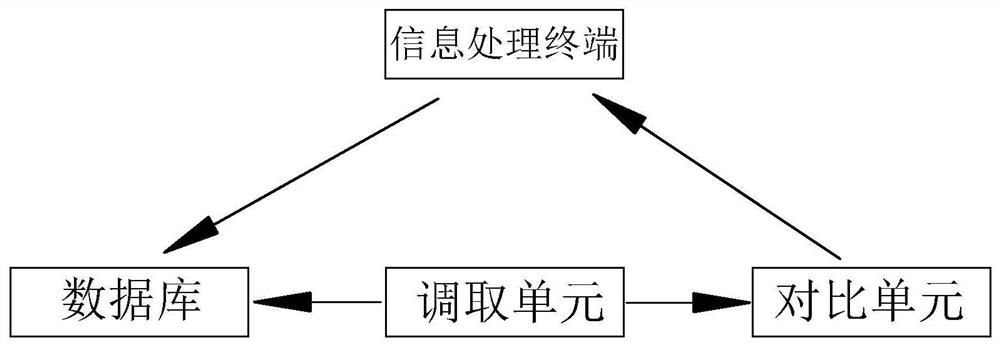
[0053] The information processing terminal is connected to the land robot to receive the amplitude data of the land robot, and analyzes and processes the amplitude data of the land robot. The inform...
Embodiment 2
[0059] An evaluation method for an intelligent ground-air heterogeneous multi-robot performance evaluation system, characterized in that: the evaluation method includes the following steps:
[0060] Step 1: The aerial robot is connected to the evaluation processing terminal to receive evaluation data, and the aerial robot carries a No. 2 camera; the No. 2 camera is a 40-megapixel analog camera, and monitors the forward route scene of the land robot. real-time shooting;
[0061] Step 2: The route planning terminal is connected to the aerial robot to receive the land robot’s forward route scene and evaluation data, and conducts real-time analysis on the land robot’s forward route scene, and combines it with the land robot’s evaluation data for intelligent planning In the search and rescue process, the land robot can move forward without hindrance, and generate digital route data at the same time;
[0062] Step 3: The command terminal is connected to the route planning terminal ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com