Third-order low-rank tensor completion method based on GPU
A third-order tensor and completion technology, which is applied in the field of high-performance computing, can solve the problems of unsuitable large-scale tensor processing and running time increase, and achieve the effect of improving computing efficiency and improving computing efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
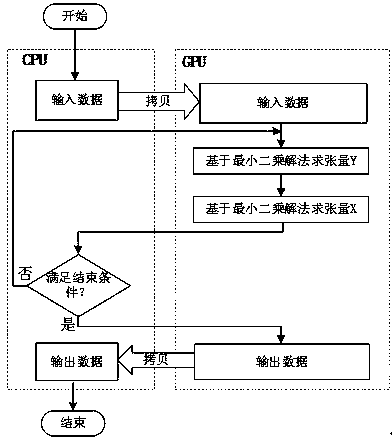
[0045] A GPU-based third-order low-rank tensor completion method, the steps are as follows figure 1 shown, including:
[0046] Step 1: The CPU transmits the input data DATA1 to the GPU, and the number of initialization cycles l=1;
[0047] Step 2: GPU obtains a third-order tensor Y of a current cycle l based on the least squares solution l ;
[0048] Step 3: GPU obtains a third-order tensor X of the current cycle l based on the least squares solution l ;
[0049] Step 4: The CPU checks whether the end condition is satisfied, if it is satisfied, go to step 5, otherwise, increase the number of cycles l by 1 and go to step 2 to continue the loop;
[0050]Step 5: The GPU transmits the output data DATA2 to the CPU.
Embodiment 2
[0051] Embodiment 2: This embodiment is basically the same as Embodiment 1, and the special features are as follows:
[0052] The step 1 includes:
[0053] Step 1.1: Allocate space in GPU memory;
[0054] Step 1.2: Transfer the input data DATA1 in the CPU memory to the allocated space in the GPU memory. DATA1 contains the following data:
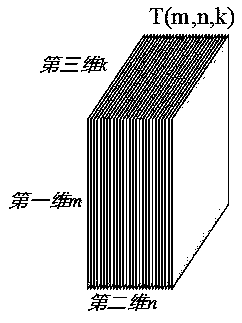
[0055] (1) A third-order tensor T∈R to be completed m×n×k . R represents a real number, and m, n, and k are the sizes of the first, second, and third dimensions of the tensor T, respectively. The total number of elements of this tensor is m×n×k, and the tensor elements whose first, second, and third dimensions are i, j, and k respectively are recorded as T i,j,k .
[0056] (2) An observation set S∈o×p×q, and o≤m, p≤n, q≤k.
[0057] (3) An observation set S and tensor T∈R to be completed m×n×k The observation tensor TP ∈ R m×n×k . TP is obtained by using the observation function ObserveS() on T, that is, TP=ObserveS(T). Among them,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com