Non-linear mechanical system type fixed time control method considering actuator faults
A mechanical system, fixed time technology, applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve the problems of measurement noise and interference controller amplification, low system steady-state accuracy, chattering, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] Now in conjunction with embodiment, accompanying drawing, the present invention will be further described:
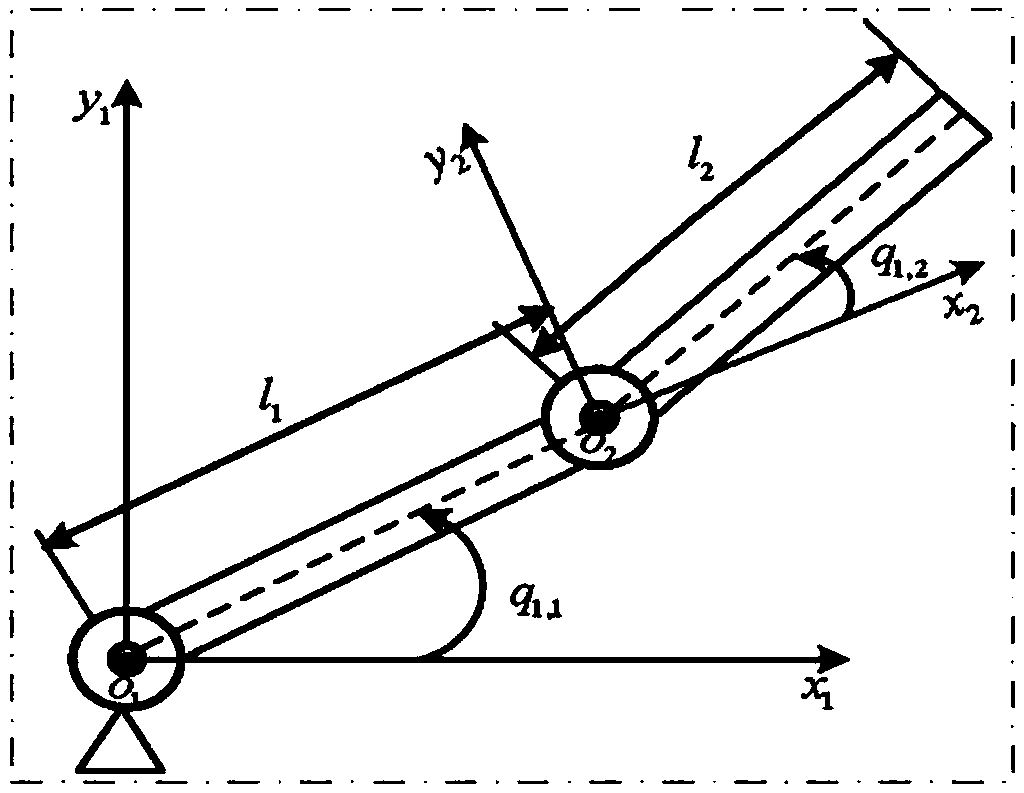
[0054] The present invention uses a two-link manipulator system as the implementation object, wherein the quality and length of the two links are respectively m 1 =1kg,m 2 =2kg,l 1 =1.5m,l 2 = 1m, the initial position of the joint angle of the manipulator is q 1 =[2,-2] T and q 2 =[0,0] T rad, the reference trajectory of the joint angle of the manipulator is set to y r =[sin(0.5t),cos(0.5t)] T rad, the actuator fault is designed as
[0055]
[0056] Among them: the lower bound of the multiplicative fault is set to b 0 = 0.1.
[0057] The parameters of the new fixed-time reachability function are selected as
[0058] The gain and initial value of control law and adaptive law are selected as k 1,i =0.05,k 2,i =200(i=1,2,3), ζ 0 =0.001,ι 0 =0.05,
[0059] The specific steps are:
[0060] Step 1: Modeling and Case Analysis of Nonlinear Mechan...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com