Surgical puncture actuating mechanism and surgical mechanical arm adopting same
A technology of actuators and robotic arms, applied in the field of medical devices, can solve the problems of inability to move with breathing, skin tearing, high cost of devices, etc., and achieve the effect of eliminating track deviation and puncture point damage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with specific embodiments and with reference to the accompanying drawings. Various orientation words among the present invention, such as " front ", " back ", " left ", " right ", " upper ", " lower " etc. are just for the convenience of description, are used to describe the relative position between each component relationship, rather than limiting the present invention, and the different placement of products in the present invention may lead to changes in various orientation descriptions.
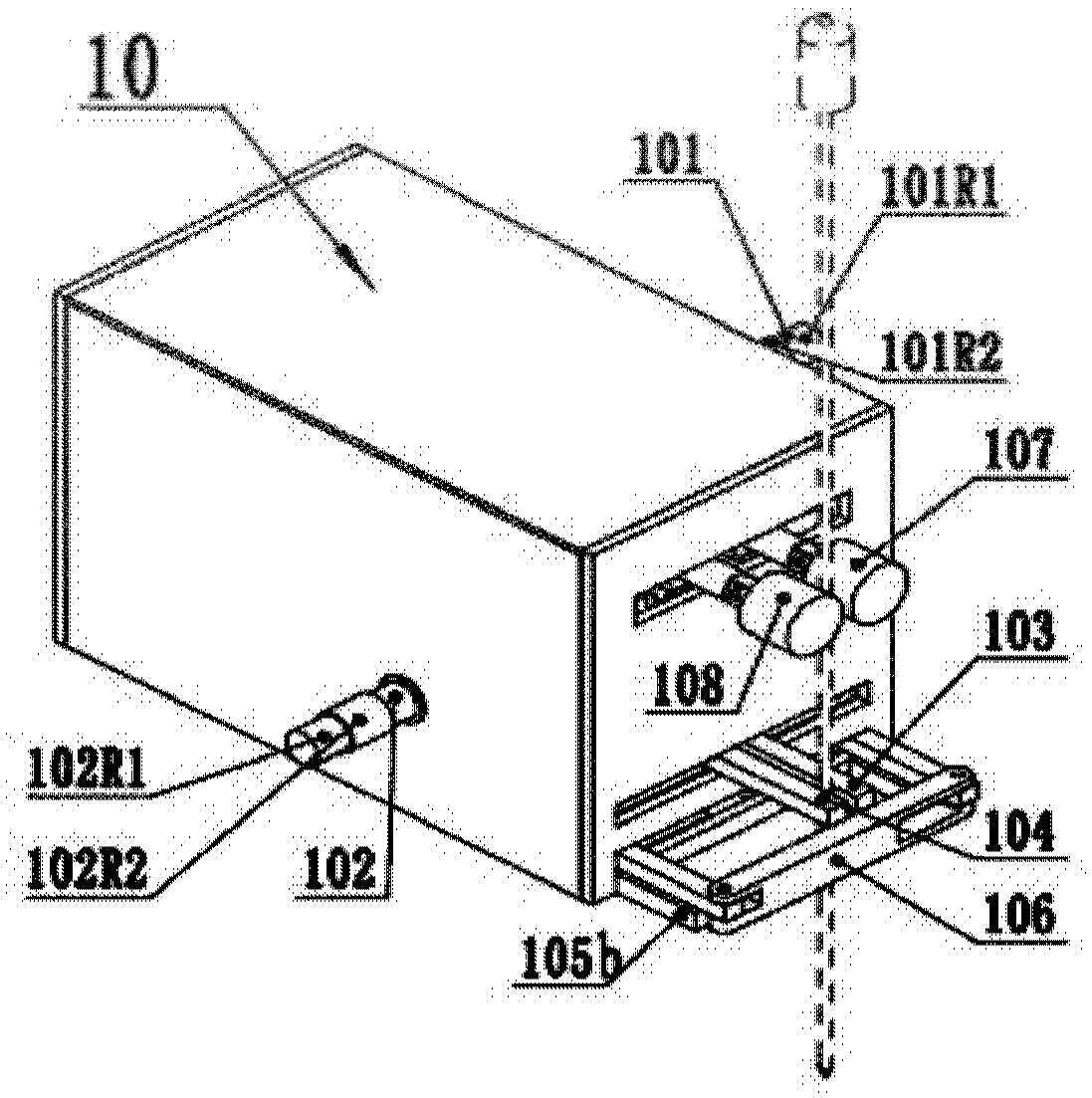
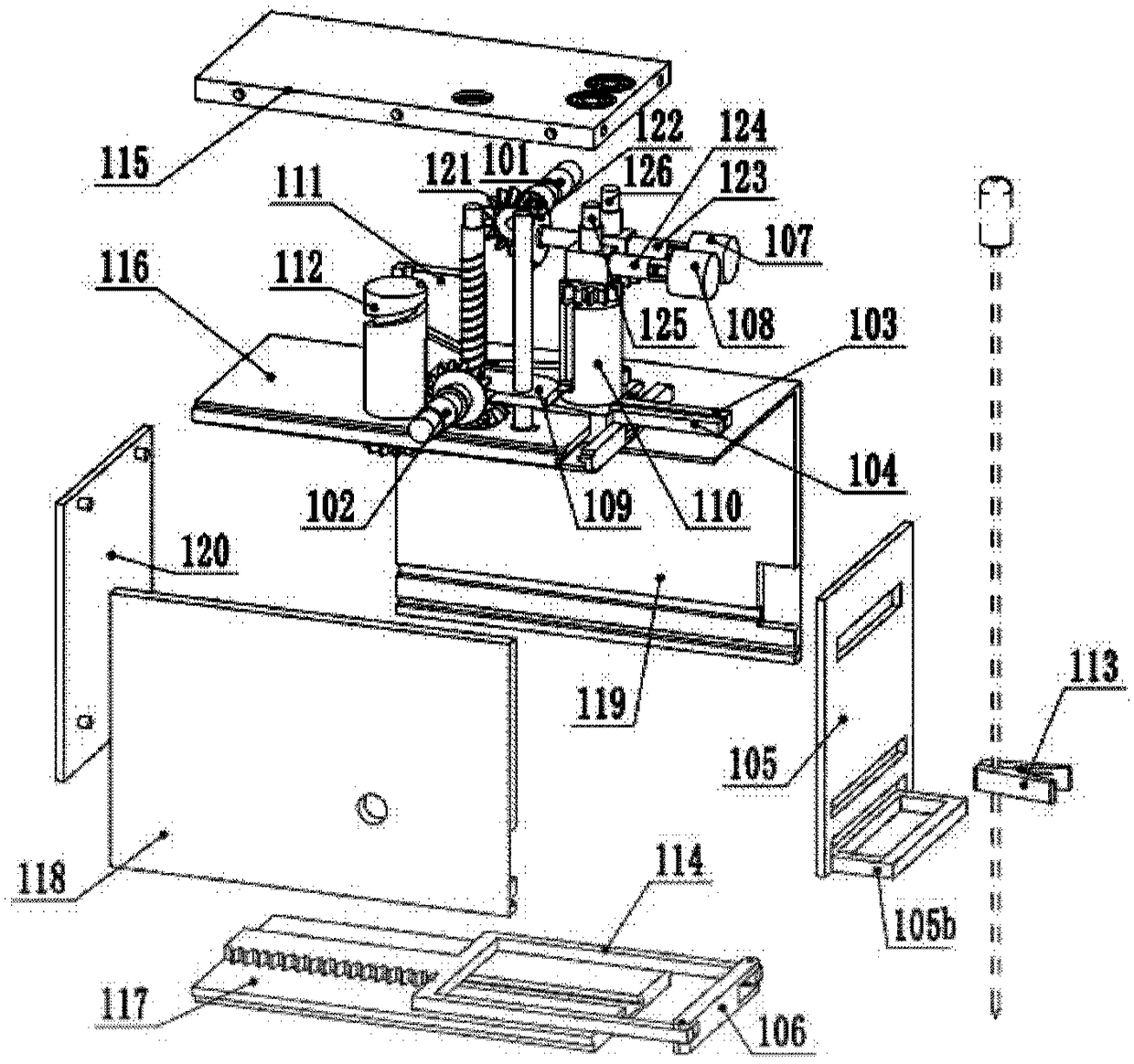
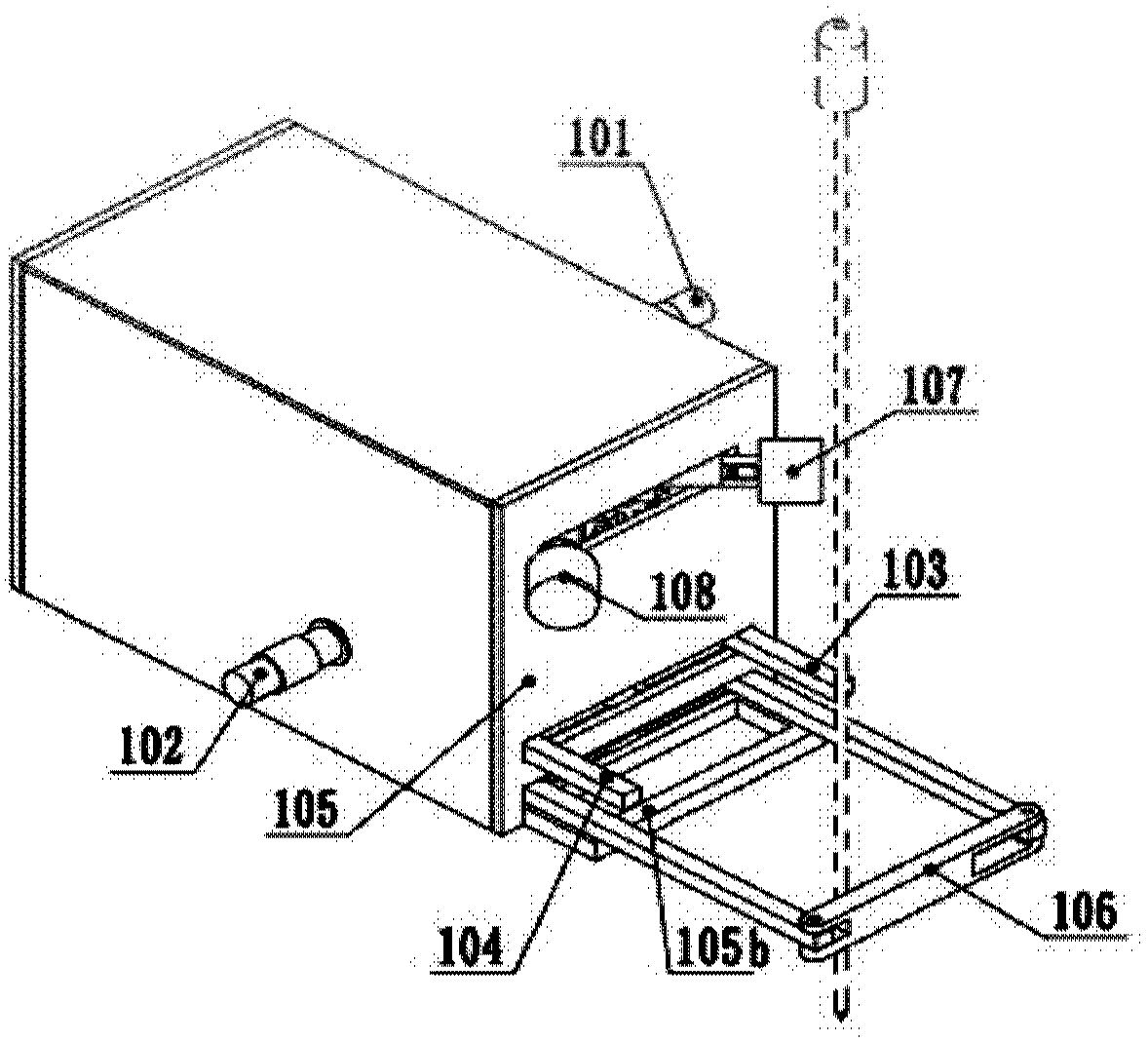
[0032] The invention discloses a terminal puncture actuator adapted to a distal slave mechanical arm in a master-slave control medical robot system with an RCM (Remote center of motion) remote motion center mechanism as a puncture instrument posture adjustment device. The mechanism not only Can hold surgical...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com