Calibration method for acceleration meter of unmanned aerial vehicle based on LM algorithm
A technology of accelerometer and LM algorithm, applied in speed/acceleration/shock measurement, testing/calibration of speed/acceleration/shock measurement equipment, measuring devices, etc., can solve the problem of small amount of model calculation, loss of effective information, and increase of error model complexity etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0075] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
[0076] The application principle of the present invention will be described in detail below in conjunction with the accompanying drawings.
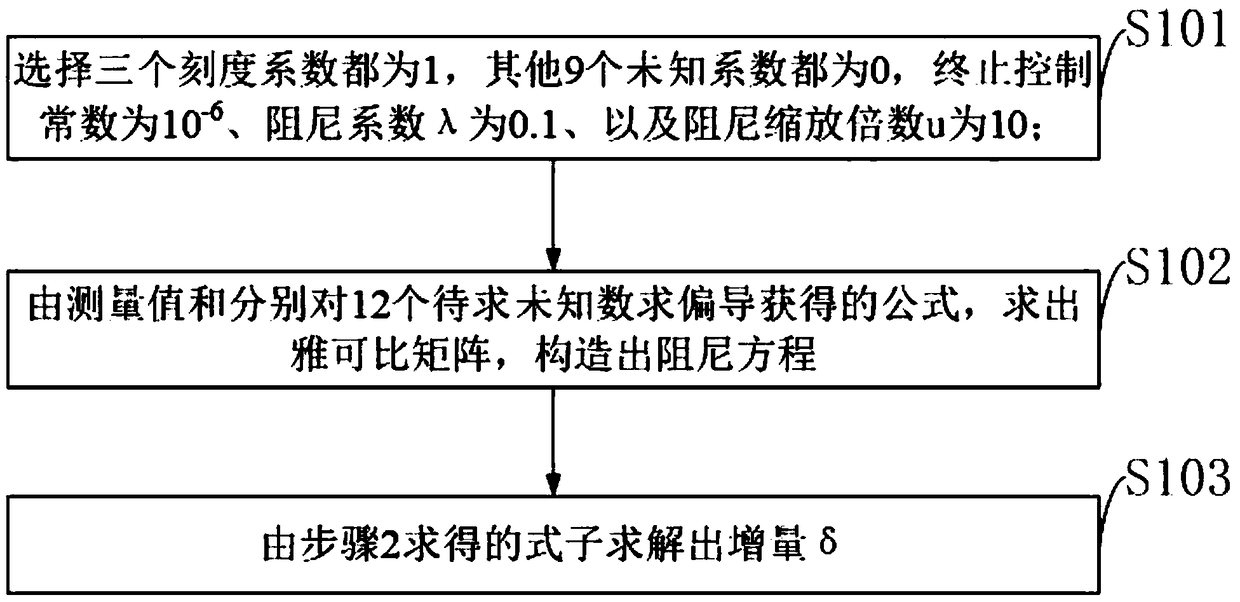
[0077] like figure 1 As shown, the UAV accelerometer calibration method based on the LM algorithm provided by the embodiment of the present invention specifically includes the following steps:
[0078] S101: Select the three scale coefficients as 1, the other 9 unknown coefficients as 0, and the termination control constant ε as 10 -6 , the damping coefficient λ is 0.1, and the damping scaling factor μ is 10; then calculate
[0079] S102: Calculate the Jacobian matrix from the me...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com