Panoramic inertial navigation SLAM method based on multiple key frames
A key frame, panorama technology, applied in the direction of navigation through velocity/acceleration measurement, camera devices, etc., can solve the problems of large influence of scale estimation, visual SLAM method cannot be used normally, light sensitivity, etc., to improve accuracy and robustness performance, verify the real-time performance of the system, and take into account the effect of computing efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
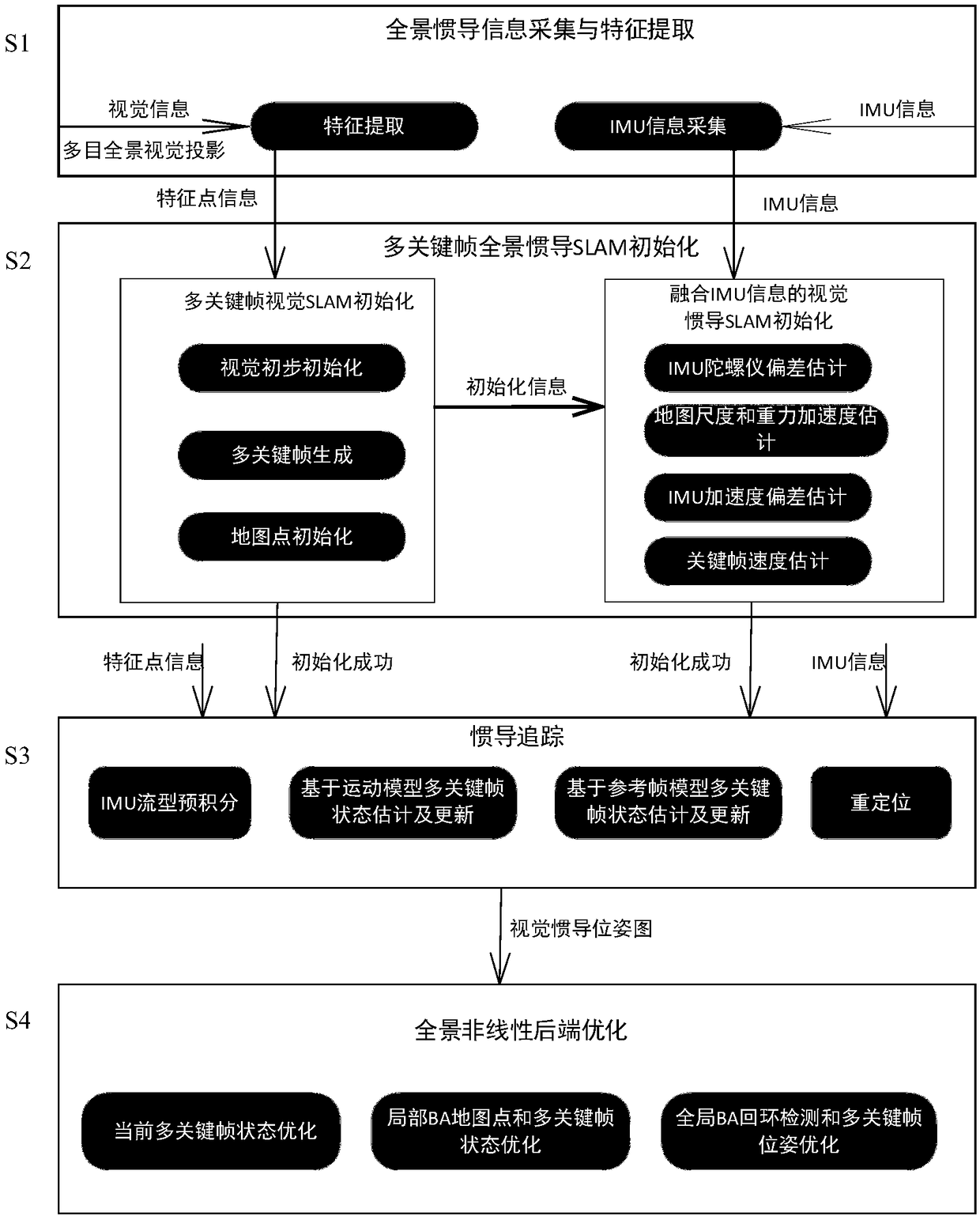
[0034] This embodiment provides a multi-keyframe-based panoramic inertial navigation SLAM method, please refer to figure 1 , is shown as a flow diagram of the multi-keyframe-based panoramic inertial navigation SLAM method. like figure 1 Described, described panoramic inertial navigation SLAM method comprises the following steps:
[0035] S1, panoramic inertial navigation information collection and feature extraction. In this embodiment, through hardware synchronous triggering, the inertial unit is operated in real time at a frequency of 100HZ, and the three cameras are operated in real time at a frequency of 20HZ. AGAST corner points are used to extract features from each camera image and descriptors are expressed using the task-based BRIEF online learning algorithm. In this embodiment, the multi-eye panoramic vision projection determines the multi-body frame by the external reference relationship of the three cameras, and extracts the projection relationship between the fea...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com