An electromagnetically driven soft crawling robot
A crawling robot, electromagnetic drive technology, applied in the direction of motor vehicles, transportation and packaging, etc., to achieve the effect of stable drive mode, simple structure, and easy manufacture
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] In order to fully understand the purpose, features and effects of the present invention, the present invention will be described in detail through the following specific implementation modes.
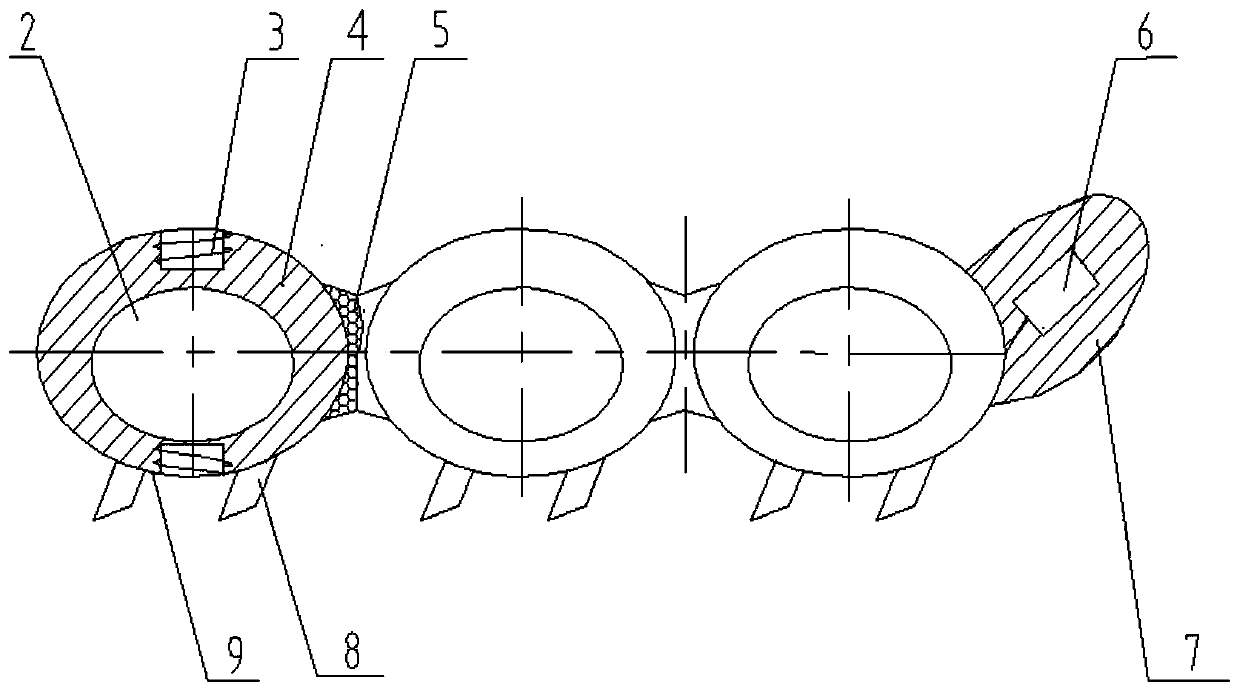
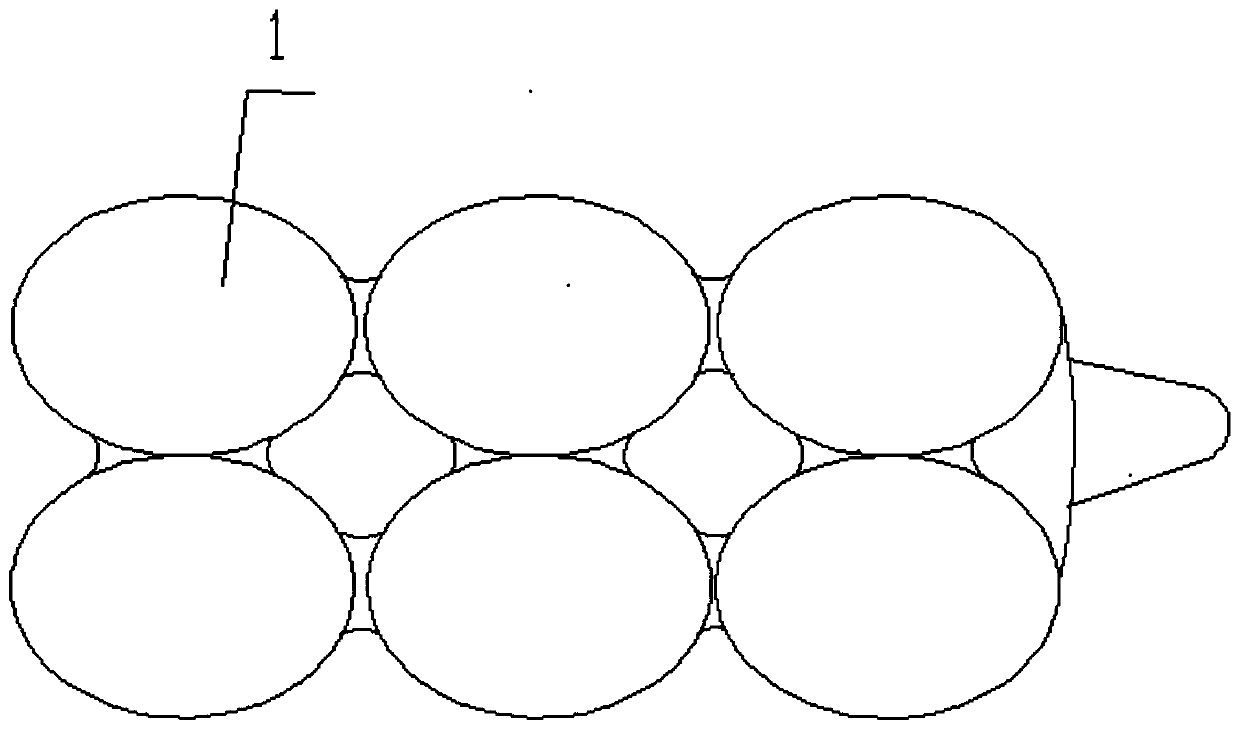
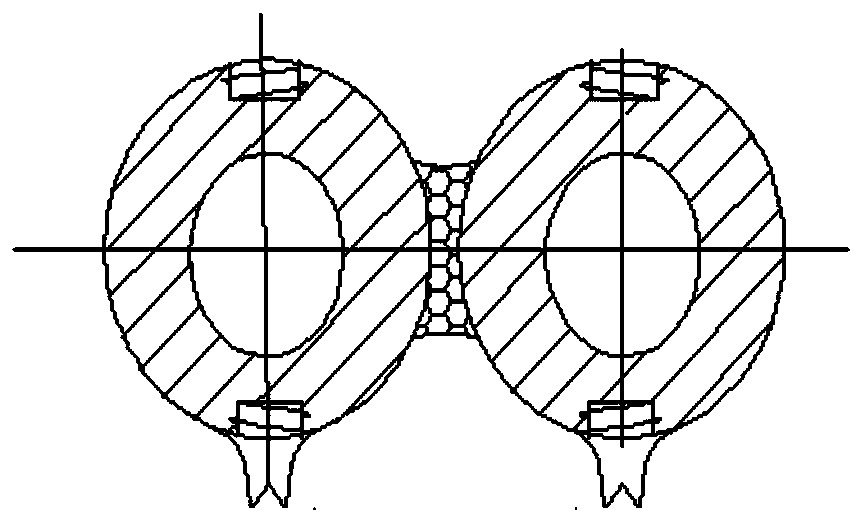
[0027] like figure 1 , figure 2 and image 3 As shown, an electromagnetically driven soft crawling robot of the present invention mainly includes a soft body unit cell 1 forming a torso, a head 7, and six pairs of friction legs 8. The soft unit cell 1 mainly includes a liquid cavity 2, a flexible electromagnet 3, a skin structure 4 and a conductive superelastic material 9 embedded in the skin. The liquid cavity 2 is biased in the soft unit cell 1 and filled with liquid. Flexible electromagnets 3 are symmetrically arranged up and down in the soft unit cell 1 , and the conductive superelastic material 9 will be connected with the flexible electromagnet 3 and the wireless transceiver module 6 in the unit cell, and the conductive superelastic material 9 is embedded in the skin str...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com