


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Positioning device, positioning method, and electronic device
A technology of a positioning device and a positioning body, applied in the field of communication, can solve problems such as poor accuracy, poor positioning accuracy of cellular base stations, and inapplicability to indoor environments, and achieve the effect of improving accuracy and reducing implementation requirements.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
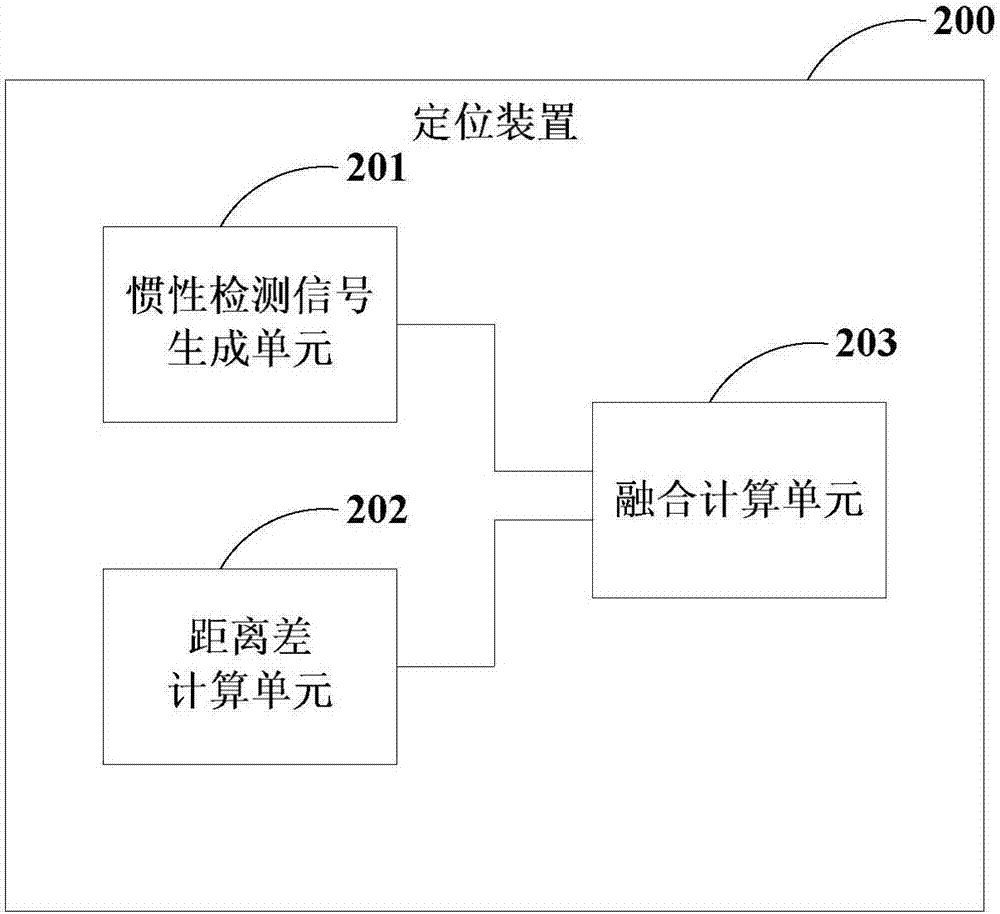
[0050] Embodiment 1 of the present application provides a positioning device for determining position information of an object to be positioned at a current position.
[0051] figure 1 is a schematic diagram of a positioning scenario applicable to the positioning device of this embodiment, as shown in figure 1 As shown, at time t0, the coordinates of the position L(k) of the object to be positioned RX are (x(k), y(k)), the distance between the object to be positioned RX and the transmitter AP is p(k), at t1 At this moment, the coordinates of the position L(k+1) of the object to be positioned RX are (x(k+1), y(k+1)), and the distance between the object to be positioned RX and the transmitter AP is p(k+1) , the position L(k) and the position L(k+1) are in the light of sight (Light Of Sight) condition with the transmitter AP respectively, and the difference between p(k+1) and p(k) is Δr(k+1), The position coordinates of the transmitter AP are fixed as (xb, yb, zb), the distance...
Embodiment 2
[0141] Embodiment 2 of the present application provides a positioning method, which corresponds to the positioning device 200 in Embodiment 1.
[0142] Figure 11 is a schematic diagram of the positioning method in this embodiment, such as Figure 11 As shown, the method includes:
[0143] S1101. Obtain an inertial detection signal related to the motion of the object to be positioned;
[0144] S1102. Calculate the distance difference between the known position and the current position of the object to be positioned relative to the same transmitting end under the condition of line of sight (Line of Sight), wherein the position of the transmitting end is fixed; and
[0145] S1103. Calculate the position information of the current position according to the distance difference, the inertial detection signal, and the position information of the known position.
[0146] Wherein, in step S1101, the detection signal of the inertial sensor may be processed to obtain an inertial dete...
Embodiment 3
[0176] Embodiment 3 of the present application provides an electronic device, where the electronic device includes: the positioning device as described in Embodiment 1.
[0177] Figure 17 It is a schematic diagram of the structure of the electronic device in Embodiment 3 of the present application. like Figure 17 As shown, the electronic device 1700 may include: a central processing unit (CPU) 1701 and a memory 1702; the memory 1702 is coupled to the central processing unit 1701. Among them, the memory 1702 can store various data; in addition, it also stores information processing programs, and executes the programs under the control of the central processing unit 1701 .
[0178] In one embodiment, the function of the positioning device can be integrated into the central processing unit 1701 .
[0179] Wherein, the central processing unit 1701 can be configured as:
[0180] Obtain an inertial detection signal related to the motion of the body to be positioned;
[0181] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com