AGV path planning method based on shortest path depth optimization algorithm
An optimization algorithm and path planning technology, applied in road network navigators, two-dimensional position/channel control, etc., can solve the problems of slow AGV path planning system and reduce the running speed of the algorithm, so as to improve stability and efficiency, and improve The effect of call efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
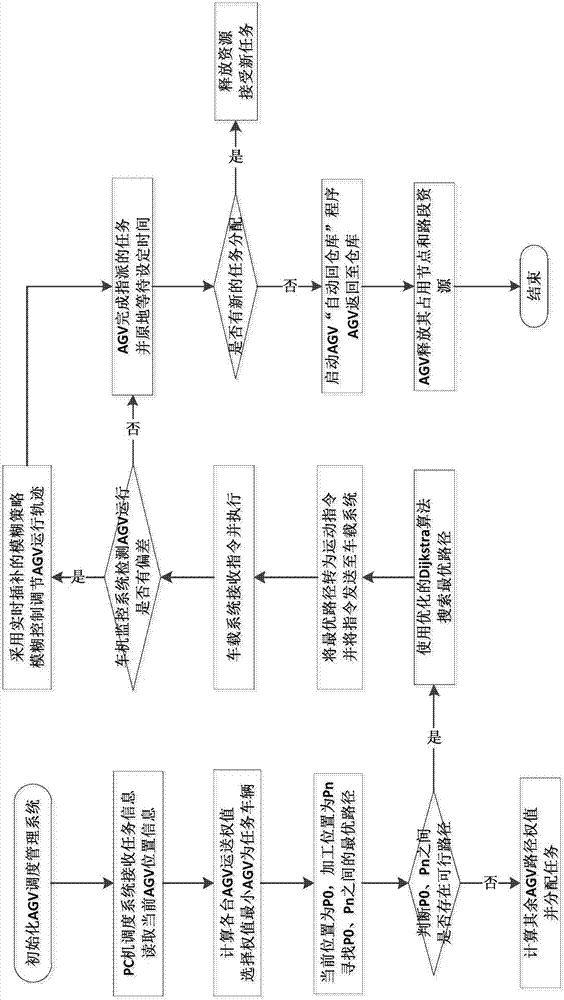
[0031] Such as figure 2 As shown, an AGV path planning method based on the shortest path depth optimization algorithm, the method includes the following sequential steps:
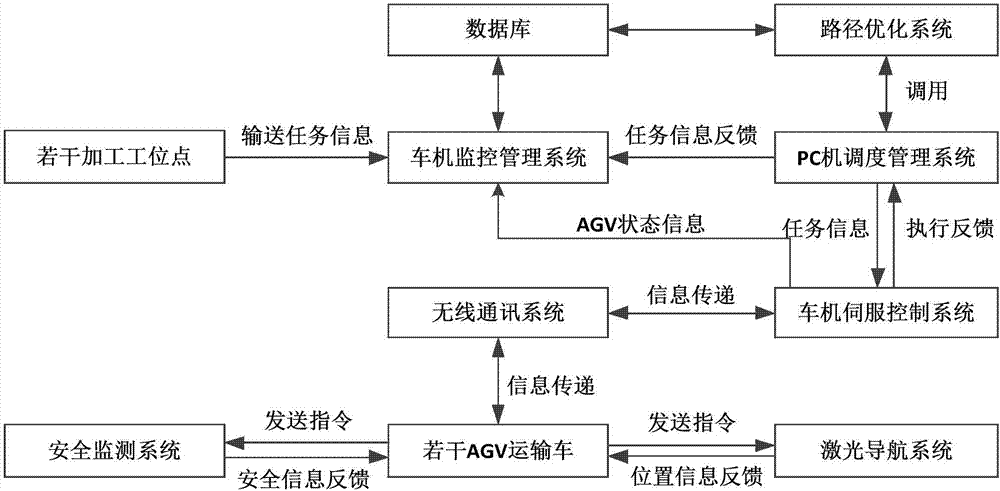
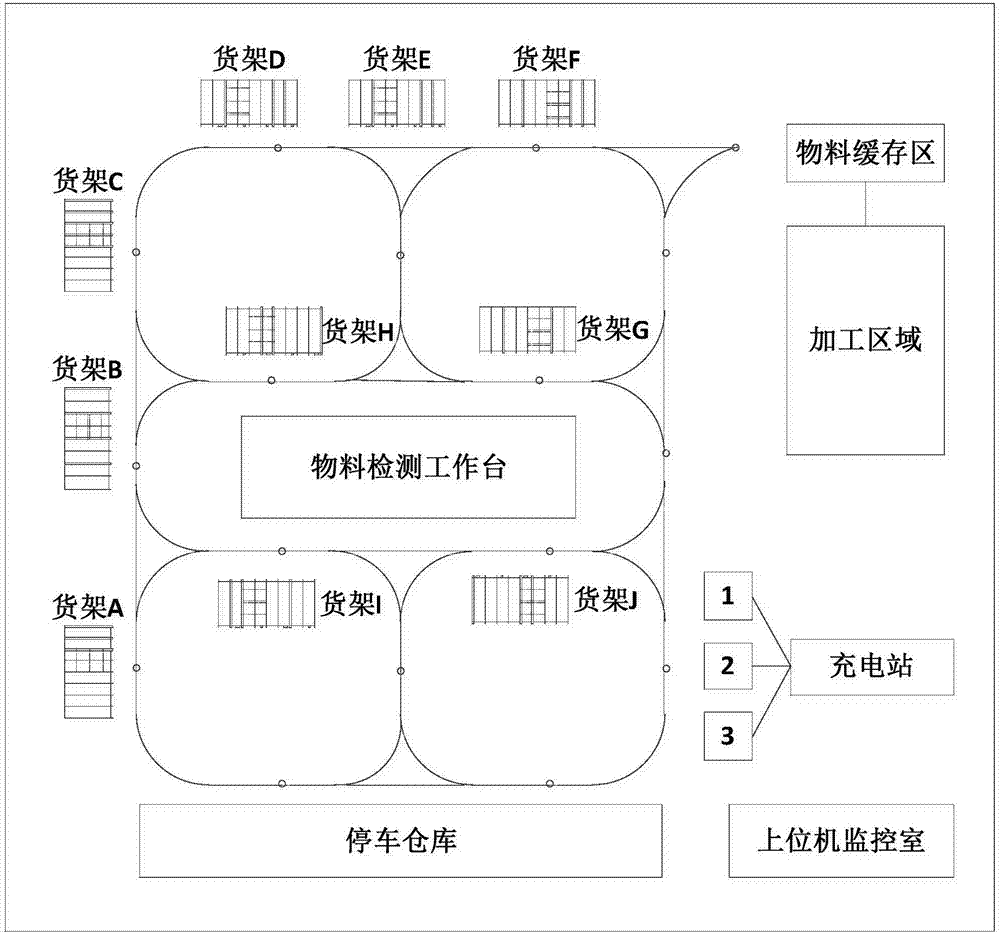
[0032] (1) Initialize the AGV dispatch management system. The PC dispatch system reads the established path map model in the database, extracts the information of key nodes P and road sections L in the map, and stores the node information in an optimized storage method. At the same time, the PC The machine dispatching system reads all the AGV status information fed back by the laser navigation system, monitors and positions the AGV, and at the same time, the car machine monitoring and management system receives the task requests for cargo delivery at different processing points in the system in real time, and the PC machine dispatching system receives the task requests and sends them The request information is sent to each AGV on-board monitoring and management system;
[0033] (2) After the AGV on-board ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com