EMG controlled air-operated soft body rehabilitative mechanical hand
A manipulator and software technology, applied in the direction of program-controlled manipulators, manipulators, passive exercise equipment, etc., can solve the problems of restricting the patient's range of activities, inconvenient to carry, high cost and price, and improve the quality of life, light weight and safety. Sex-enhancing effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention is described in further detail below in conjunction with accompanying drawing:
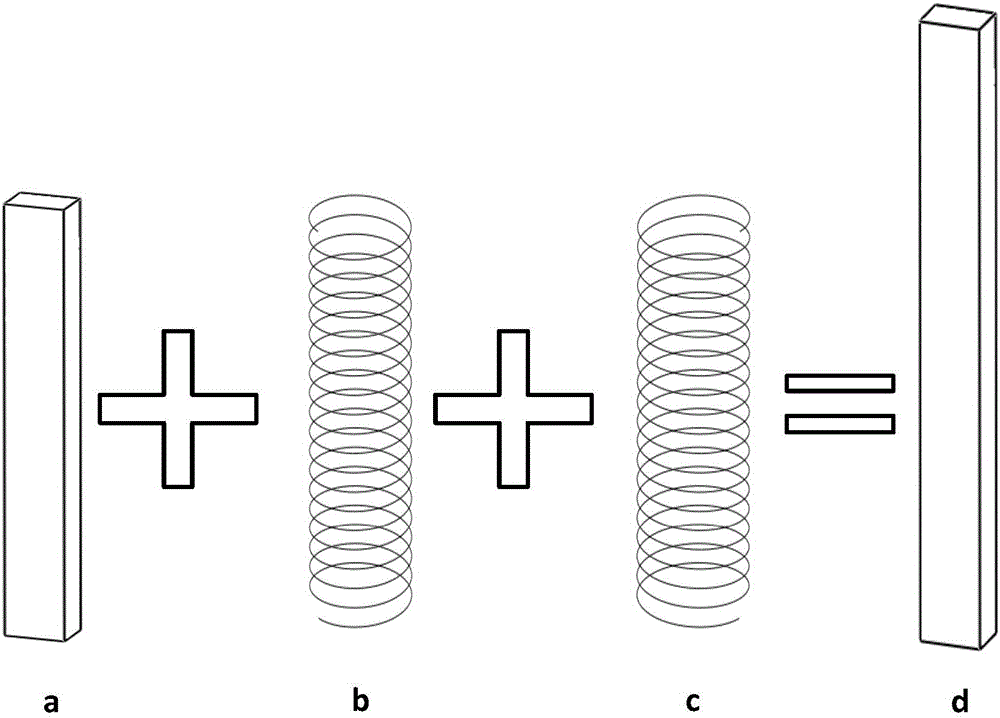
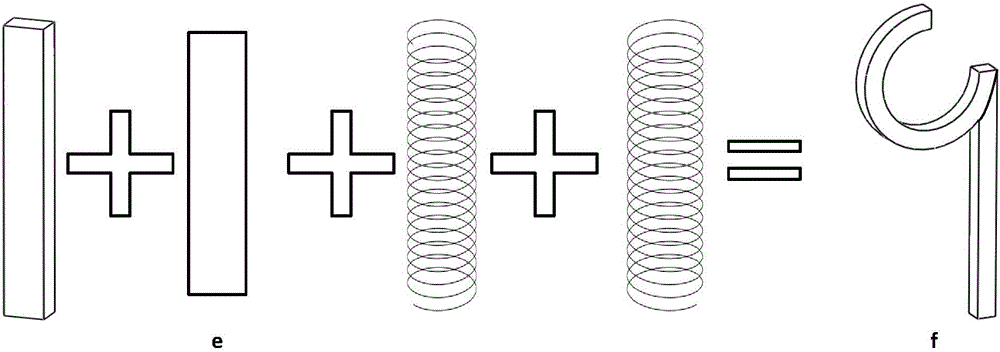
[0032] see Figure 8 , the pneumatic software rehabilitation manipulator controlled by EMG of the present invention is characterized in that it includes gloves with upper and lower layers of structure, and five hollow soft fingers installed on the upper layer of the soft gloves; the lower layer of the gloves is worn on the user's hand, each soft finger The fingers are connected to the portable drive device through the trachea. The portable drive device can collect the muscle electrical signal on the user's forearm, decode it, and use the obtained identification signal as the starting signal to control the solenoid valve and proportional valve to realize the charging and discharging of air pressure. Gas velocity adjustment for active control of soft fingers. The index finger, middle finger, ring finger and little finger of the software rehabilitation finger have a curv...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com