Model following control-based vibration suppression method for alternating current servo motor
An AC servo motor, vibration suppression technology, applied in the control of generators, control of electromechanical brakes, control of electromechanical transmissions, etc., can solve the problems of complex adaptive law, difficult implementation, weakened system anti-noise ability, etc., to improve system response performance, improved speed responsiveness, and the effect of strong anti-noise capability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
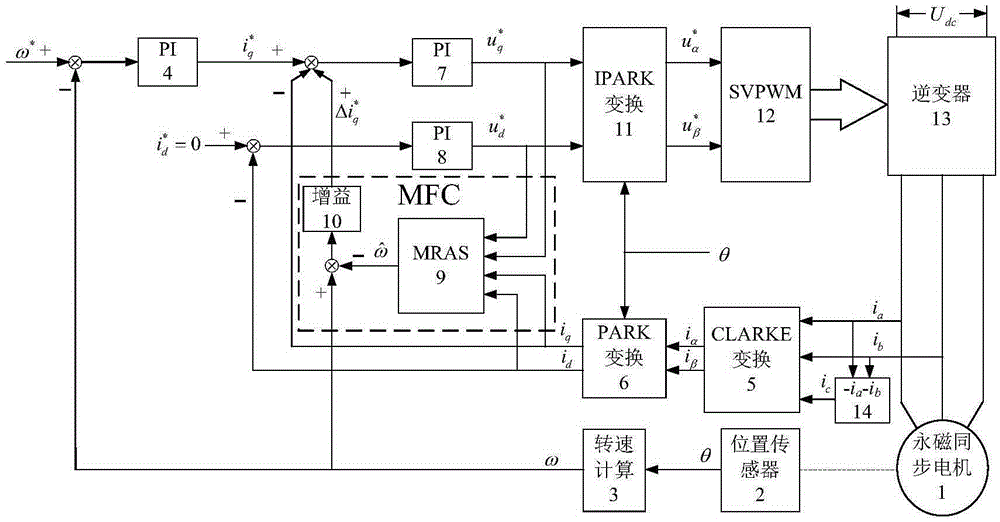
[0030]Embodiment: A general AC servo system uses a permanent magnet synchronous motor as an actuator and is a three-loop control system, that is, there are three control loops of position loop, speed loop and current loop. The present invention does not involve position loop control. For simplicity, In this embodiment, the position loop is omitted, and only the speed loop and the current loop are kept to form a common permanent magnet synchronous motor vector control system. Such as figure 1 as shown,
[0031] 1) The mechanical angle that the permanent magnet synchronous motor 1 has rotated is obtained through the detection of the position sensor 2, and then multiplied by the number of pole pairs of the motor to obtain the electrical angle θ of the motor, and the electrical angle θ is obtained through the differential processing of the rotational speed calculation module 3 to obtain the feedback rotational speed ω ;
[0032] 2) Feedback speed ω and pre-set given speed ω * F...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com