A Navigation and Positioning Method of Indoor Mobile Robot
A mobile robot, navigation and positioning technology, applied in the field of navigation, can solve the problems of high system stability and performance requirements, complex wireless sensor response network system, etc., and achieve the effects of simple measurement device, convenient implementation and high stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] The present invention is described in more detail below in conjunction with accompanying drawing example:
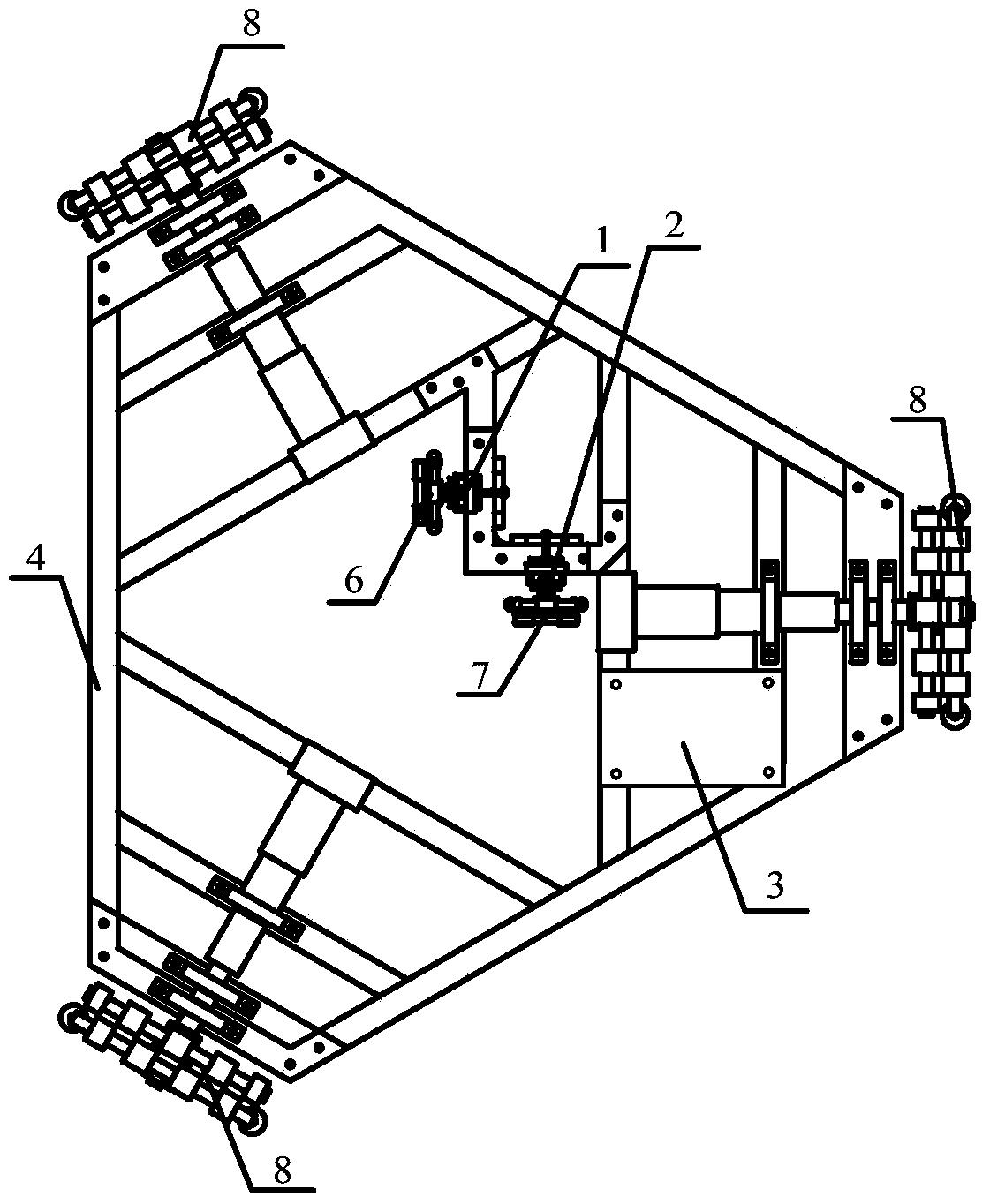
[0045] to combine Figure 1-7 , the technical solution of the present invention is: a positioning method for an indoor mobile robot based on a positioning code disc and a single-axis fiber optic gyroscope, including an omnidirectional mobile robot, two encoder axes that are not parallel and are distributed at any angle. and a single-axis fiber optic gyroscope.
[0046] The present invention provides a positioning method for an indoor mobile robot based on a positioning code disc and a gyroscope. The specific implementation steps are as follows:
[0047] The passive omnidirectional wheel 6 is installed on the encoder 1, and the passive omnidirectional wheel 7 is installed on the encoder 2, both of which are installed on the code disc mounting frame. The specific assembly relationship is as follows: Figure 4 As shown, and the installation position of the position...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com