Mechanical arm dynamic fuzzy approximator based on visual servo system
A visual servo and dynamic blur technology, applied in the direction of manipulator, general control system, control/adjustment system, etc., can solve the problems of difficulty in ensuring the stability of visual servo system, image tracking accuracy, tedious calibration, etc. The effect of trajectory tracking accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
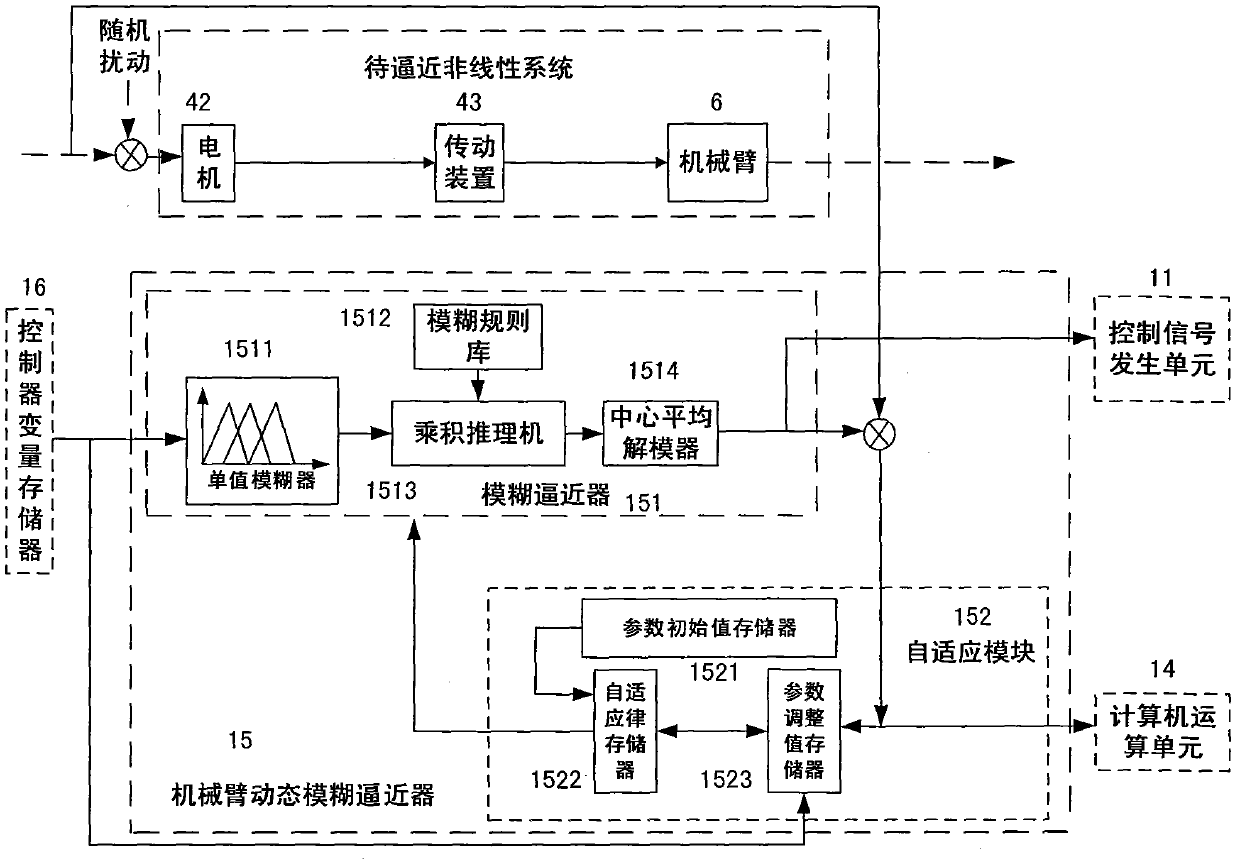
[0027] The invention relates to a dynamic fuzzy approximator for a manipulator based on a visual servo system. By using the designed dynamic fuzzy approximator for the manipulator, by continuously changing the parameters of the fuzzy approximator, the fuzzy system is used to approximate the dynamics of the nonlinear unknown manipulator. In the case of random disturbance, the designed adaptive law can also change the parameters of the approximator online, effectively eliminate the influence of disturbance and ensure the stability of the visual servo system, and at the same time control the mechanical arm so that the end feature points track on the image plane The expected image trajectory, the approximator can ensure that the feature points achieve high image tracking accuracy. The following is a detailed description of the visual servo system-based motion blur approximator for a manipulator designed in the present invention with reference to the accompanying drawings and specif...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com