Method for automatically identifying and positioning coordinates of image point of artificial mark in camera calibration control field
A technology for controlling signs and positioning methods, which is applied in image enhancement, image analysis, image coding, etc., and can solve problems such as automatic recognition and high-precision measurement of image square coordinates of difficult mark points, complicated recognition process, and complicated calculation steps.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
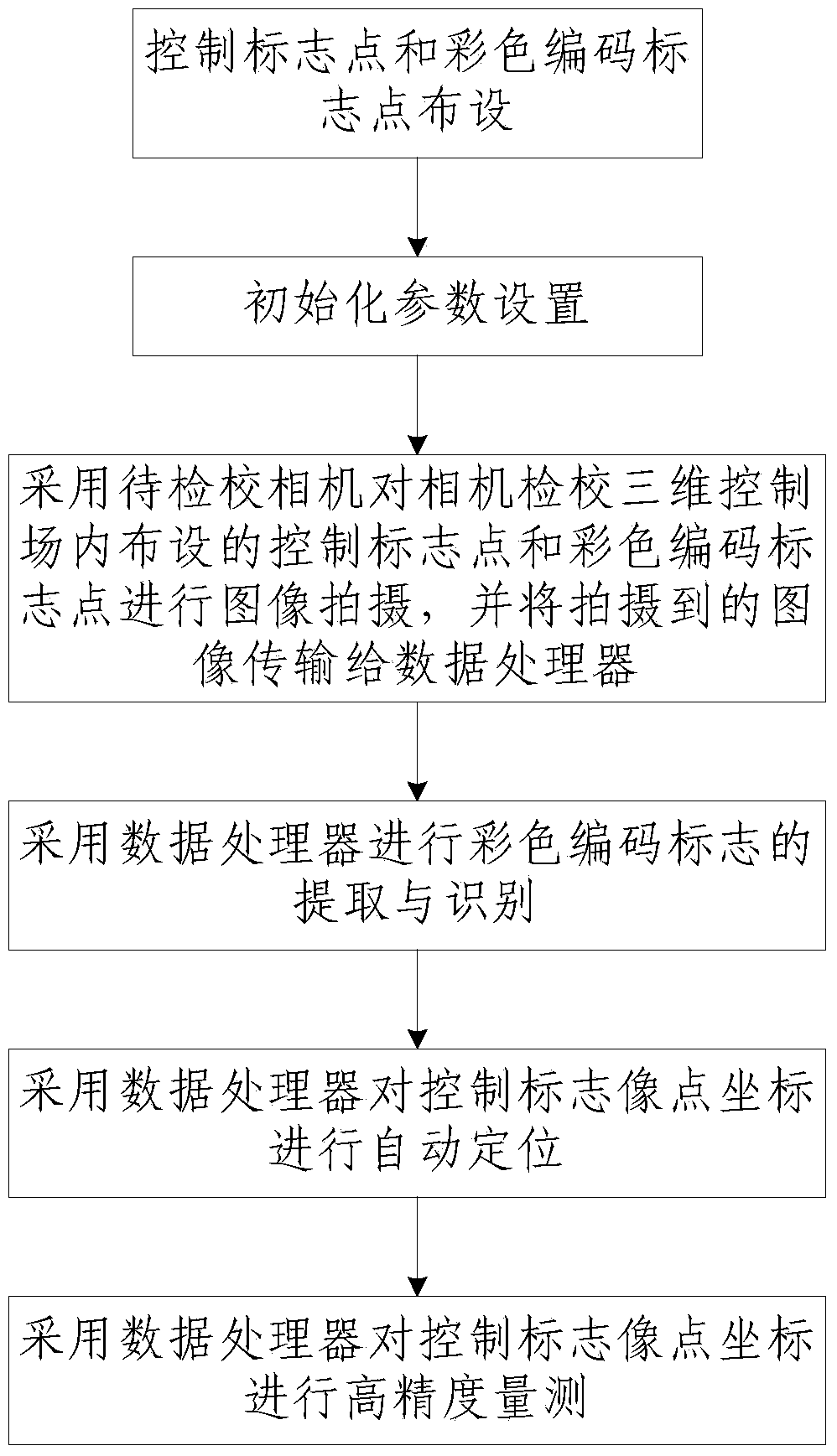
[0063] Such as figure 1 As shown, the method for automatically identifying and locating the image point coordinates of artificial signs in the camera calibration control field of the present invention includes the following steps:
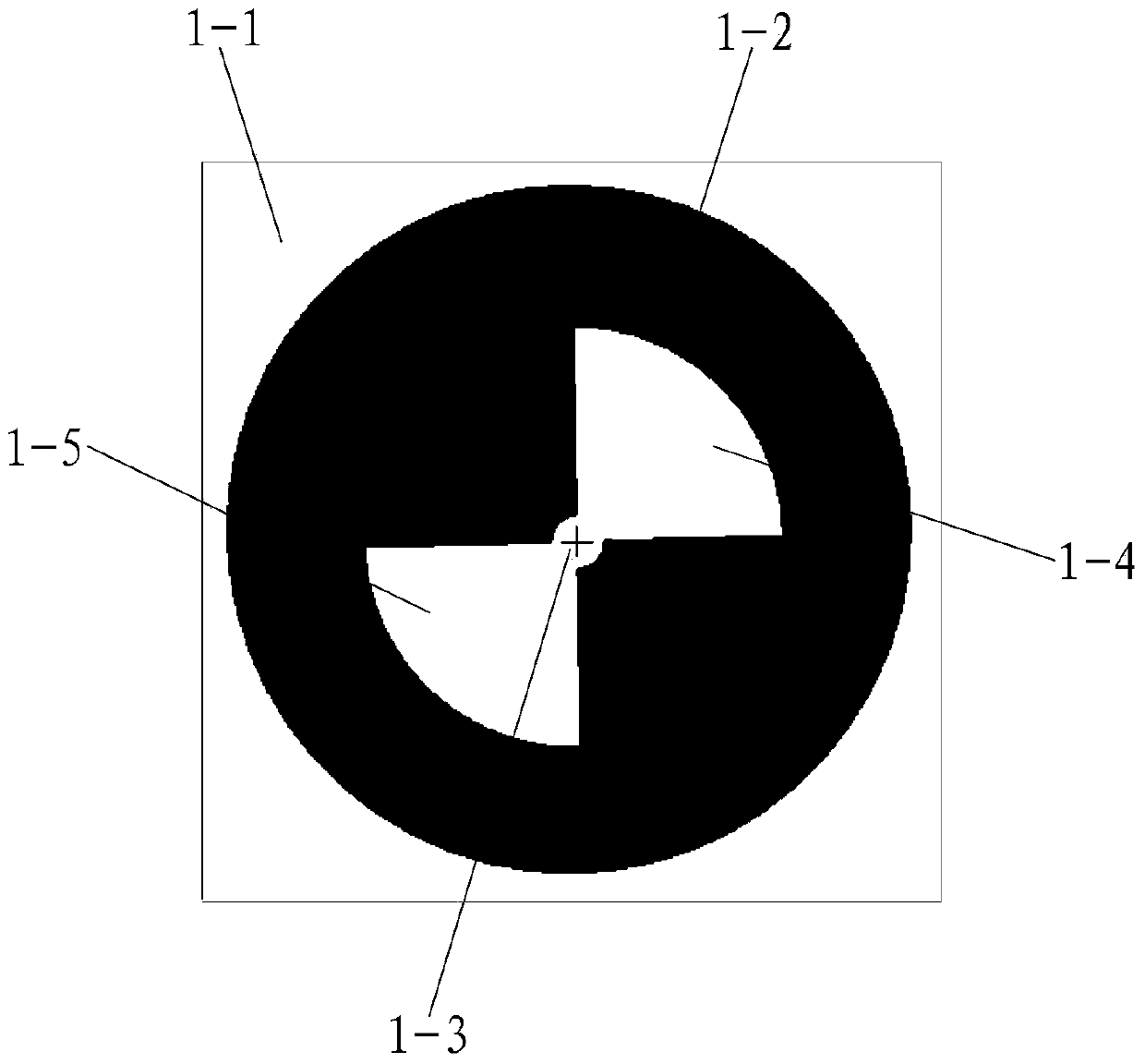
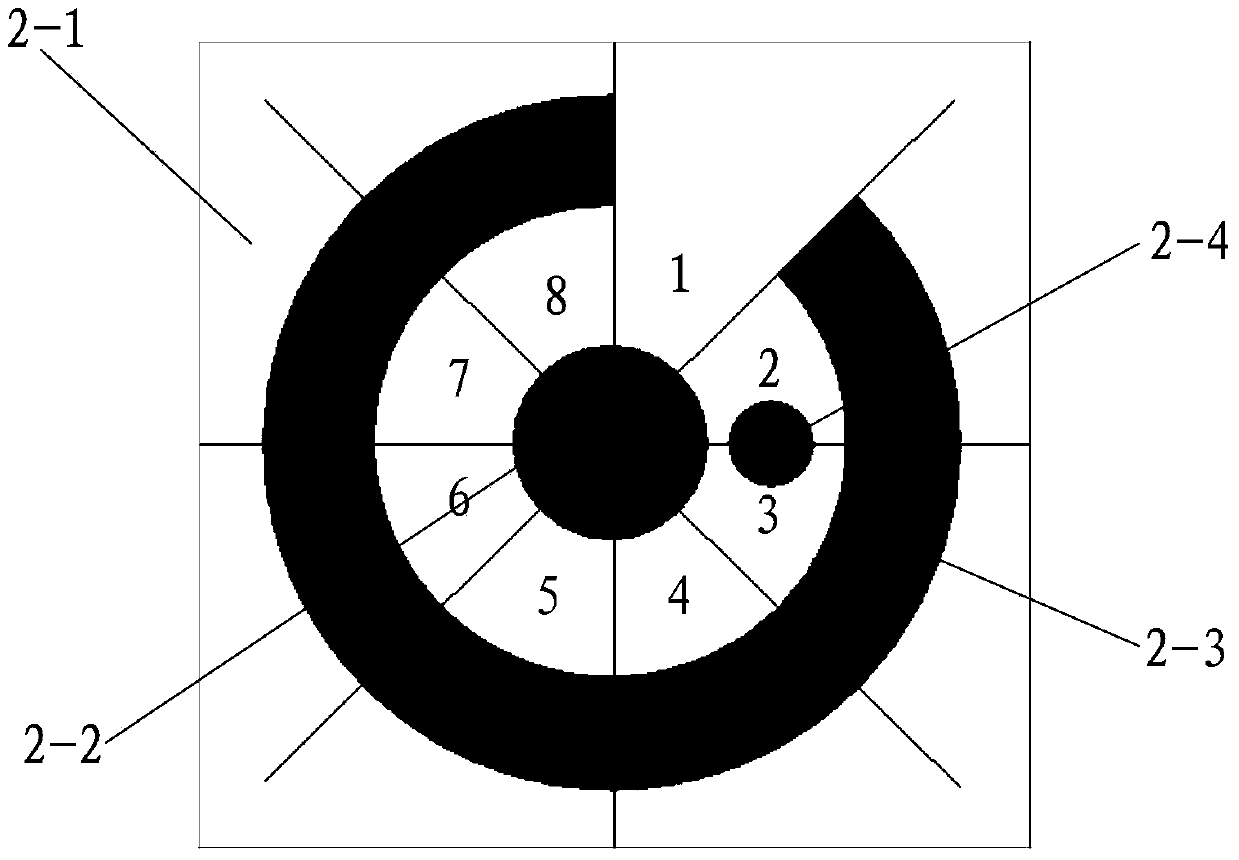
[0064] Step 1. Arrangement of control signs 1 and color-coded signs 2: a plurality of control signs 1 and a plurality of color-coded signs 2 with different codes are arranged in the three-dimensional control field for camera calibration; among them, such as figure 2 As shown, the control sign 1 includes a white base plate 1-1 of the control sign and a black outer circle 1-2 arranged on the white base plate 1-1 of the control sign. The center position of the black outer circle 1-2 is provided with a The black outer circle 1-2 is concentric with the white central circle 1-3, and the two sides of the white central circle 1-3 are provided with a white and mutually symmetrical first fan-shaped 1-4 and a second fan-shaped 1-5. The edge of a sector 1-4 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com