Intelligent control method of driverless vehicle tracking desired trajectory
An unmanned vehicle, predetermined trajectory technology, applied in two-dimensional position/channel control and other directions, can solve the problem of insufficient disclosure of parameter values in the control algorithm, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
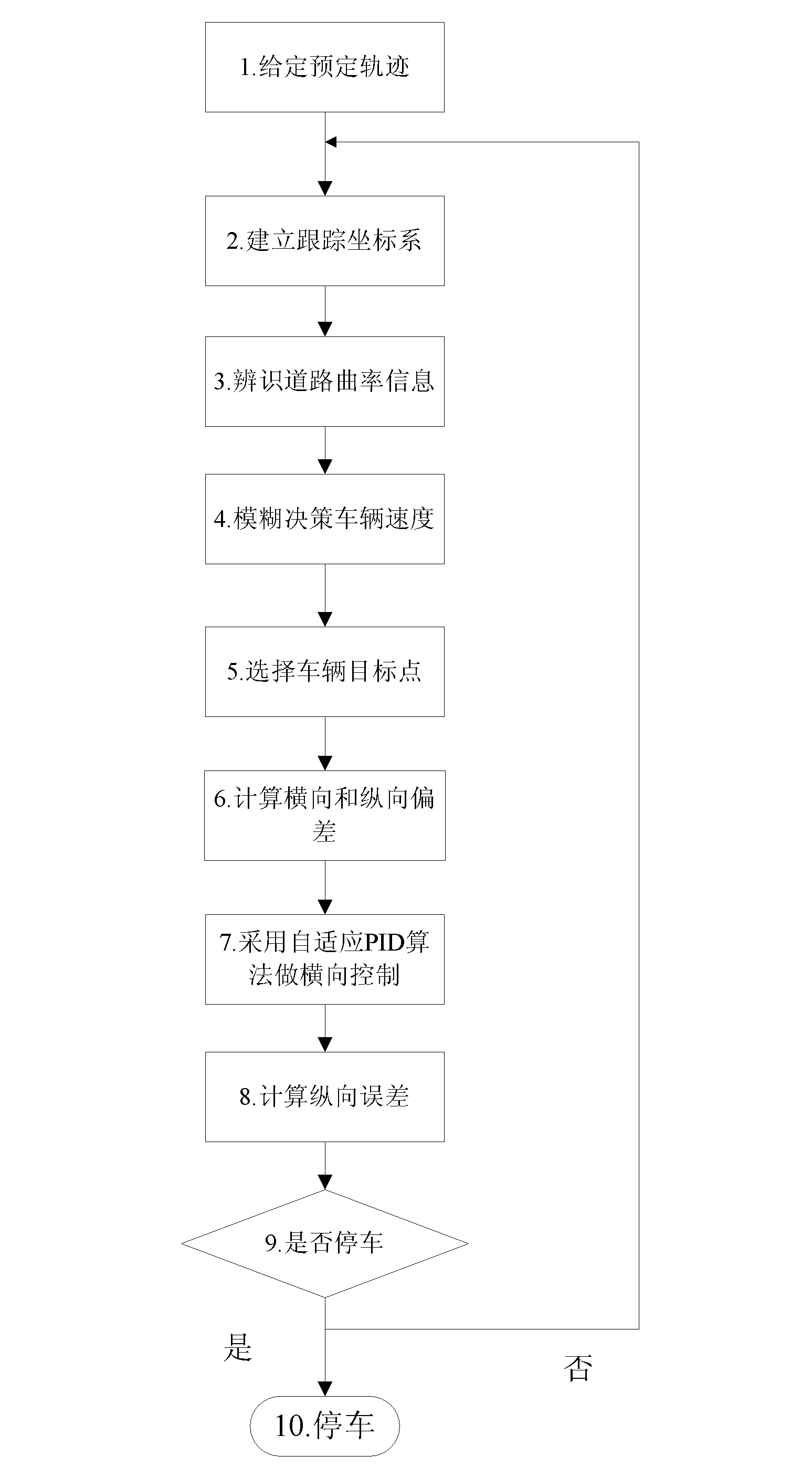
Method used
Image

Examples
Embodiment 1
[0035] Example 1: The unmanned vehicle modified with Chery "Tiggo" car tracks the arc trajectory
[0036]This embodiment takes Chery "Tiggo" refitted unmanned vehicle as an example, and specifically explains how to use the method of the present invention to realize the tracking of the predetermined trajectory and its functional effect.
[0037] The unmanned vehicle modified with Chery "Tiggo" used in this embodiment is equipped with a GPS / INS combined positioning system with a product name of SPAN-CPT provided by NovAtel, which can obtain the location of the vehicle. The longitude and latitude of the position, the vehicle speed signal and the vehicle heading angle signal, in the case of using differential positioning, the positioning accuracy can reach 0.1m. In order to realize the function of automatic driving, the steering mechanism of the vehicle is driven by a motor and driven by a worm gear. The shaft of the motor is connected with the screw of the ball screw mechanism, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com