Synchronous range/velocity measurement system based on non-scanning laser radar and CCD camera
A laser radar, scanning-free technology, applied in radio wave measurement systems, measurement devices, camera devices, etc., can solve the problem of inability to obtain motion information, direction and speed, and achieve the effect of simple structure, high precision, and small devices
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
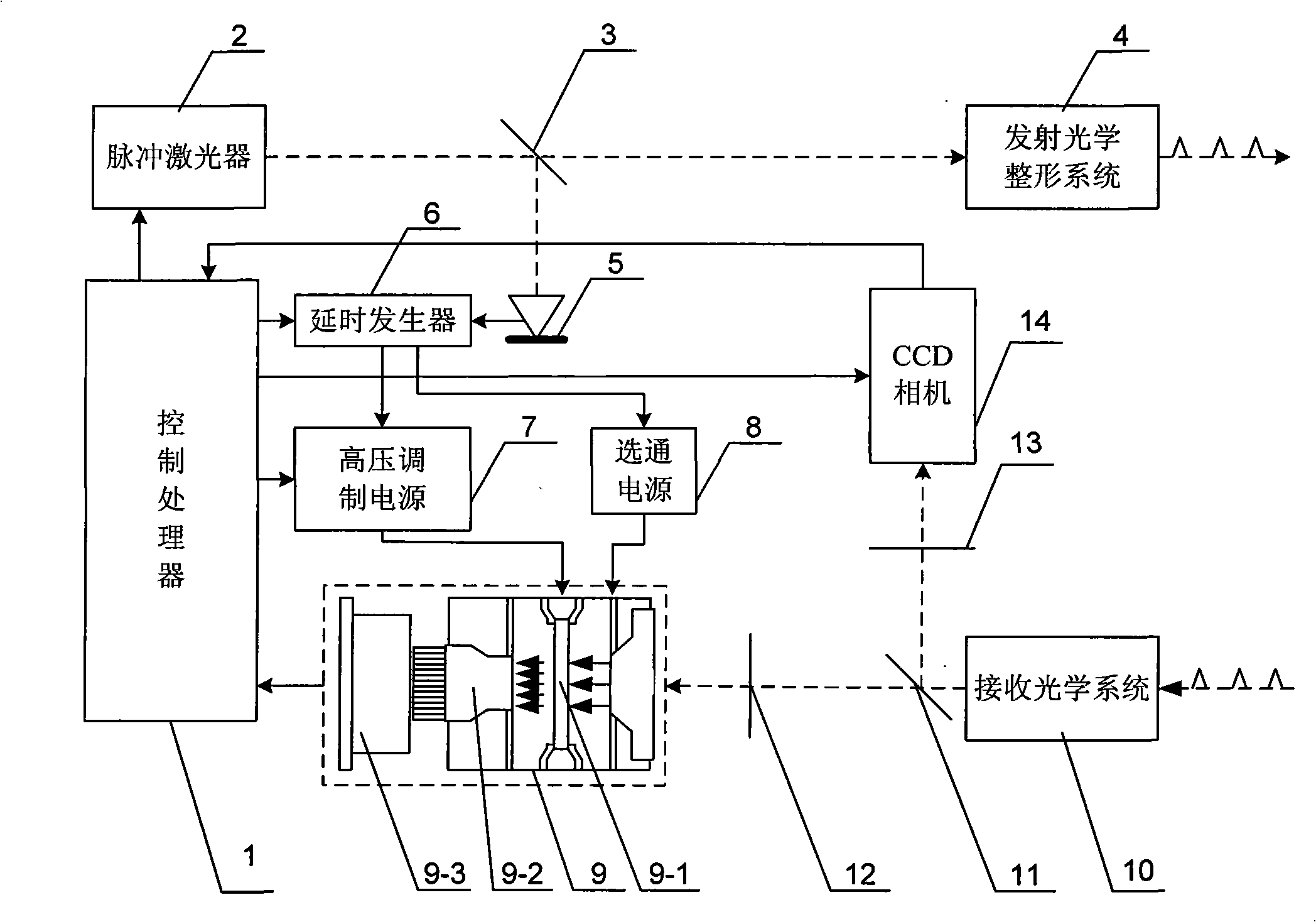
[0011] Specific implementation mode 1: Combination figure 1 To describe this embodiment, this embodiment consists of a non-scanning lidar, a control processor 1, a first optical splitter 3, a PIN decoder 5, a delay generator 6, a high-voltage modulation power supply 7, a strobe power supply 8, and a second optical splitter 11. Narrow-band filter 12, band-stop filter 13 and CCD camera 14; non-scanning lidar is composed of pulse laser 2, transmitting optical shaping system 4, ICCD area detector 9 and receiving optical system 10;
[0012] The laser beam emitted by the pulse laser 2 is split by the first beam splitter 3 and then irradiated on the receiving surface of the transmitting optical shaping system 4 and PIN decoder 5 respectively, and the laser beam irradiated on the transmitting optical shaping system 4 is shaped and then irradiated On the target, the echo pulses reflected by the target are received by the receiving optical system 10. After being converged by the receiving ...
specific Embodiment approach 2
[0014] Specific implementation manner two: combination figure 1 This embodiment is described. The difference between this embodiment and the first embodiment is that the ICCD area array detector 9 is composed of a microchannel plate 9-1, a fluorescent screen 9-2 and a CCD 9-3; the microchannel plate 9-1, The phosphor screen 9-2 and the CCD 9-3 are sequentially arranged on the same horizontal optical axis. Other components and connection modes are the same as the first embodiment.
specific Embodiment approach 3
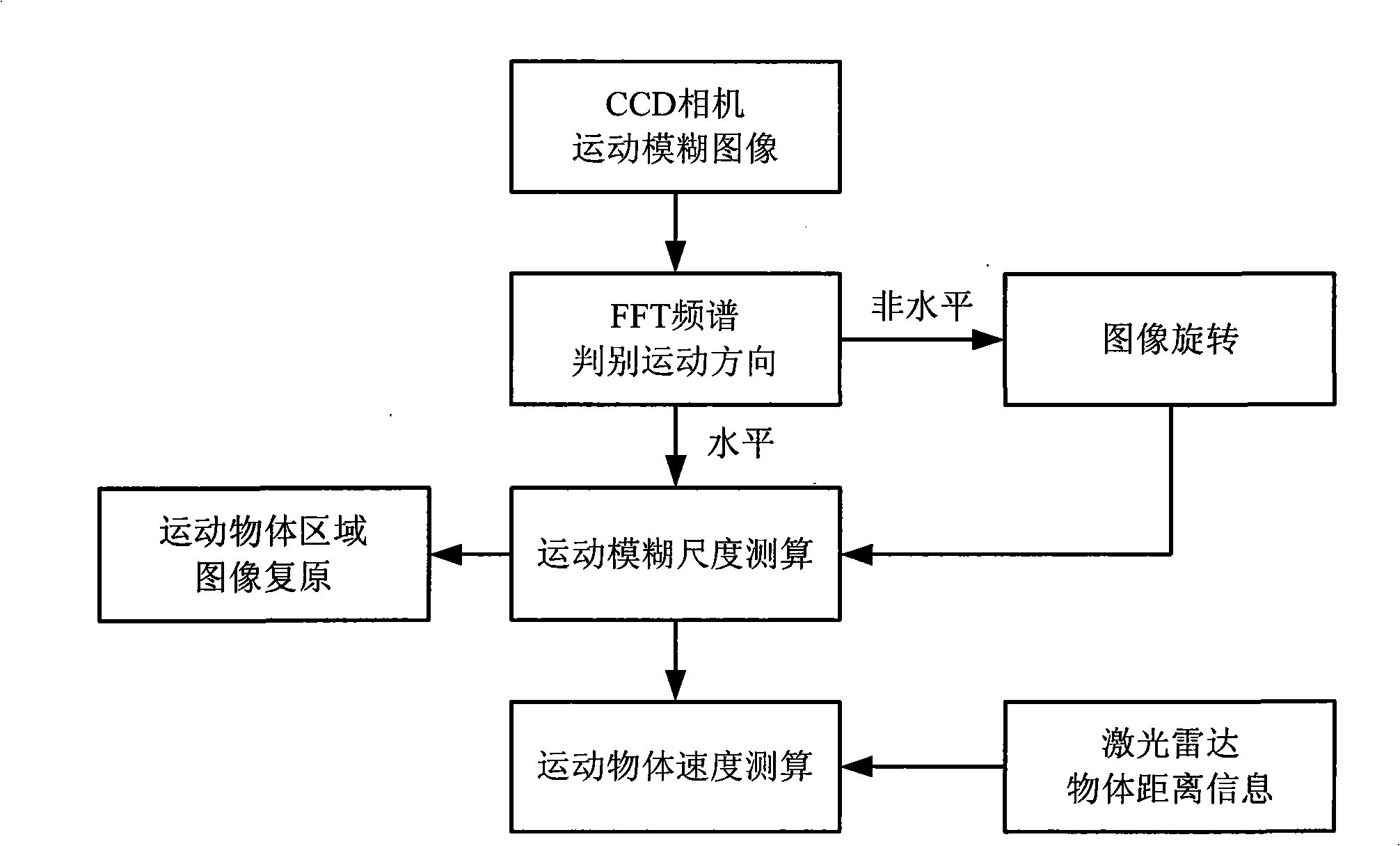
[0015] Specific implementation mode three: combination figure 2 This embodiment is described. The difference between this embodiment and the second embodiment is that the control processor 1 is used to trigger the pulse laser 2 and the high-voltage modulation power supply 7 to generate a high-voltage modulation signal, and it is also used to control the delay generator 6 to generate a delay. The signal is also used to set the exposure time of the CCD camera 14 and trigger the pulsed laser 2 to emit two pulses with time intervals during the said exposure time, and trigger the microchannel of the ICCD area array detector 9 while emitting the pulses The gain modulation of the board 9-1, the two pulses correspond to different modulation gain methods; and it is used to process the image information transmitted from the ICCD area detector 9 and the CCD camera 14 to obtain a range image. The processing process is as follows:
[0016] Firstly, the FFT spectrum determines the direction of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com