Multi-finger dexterous hand of robot based on pneumatic flexible driver
A flexible driver and robot technology, applied in the directions of manipulators, chucks, manufacturing tools, etc., can solve the problems of poor applicability, poor flexibility, complex structure, etc., and achieve the effects of convenient processing, simple and compact structure, and low cost.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] The present invention will be further described below in conjunction with the accompanying drawings.
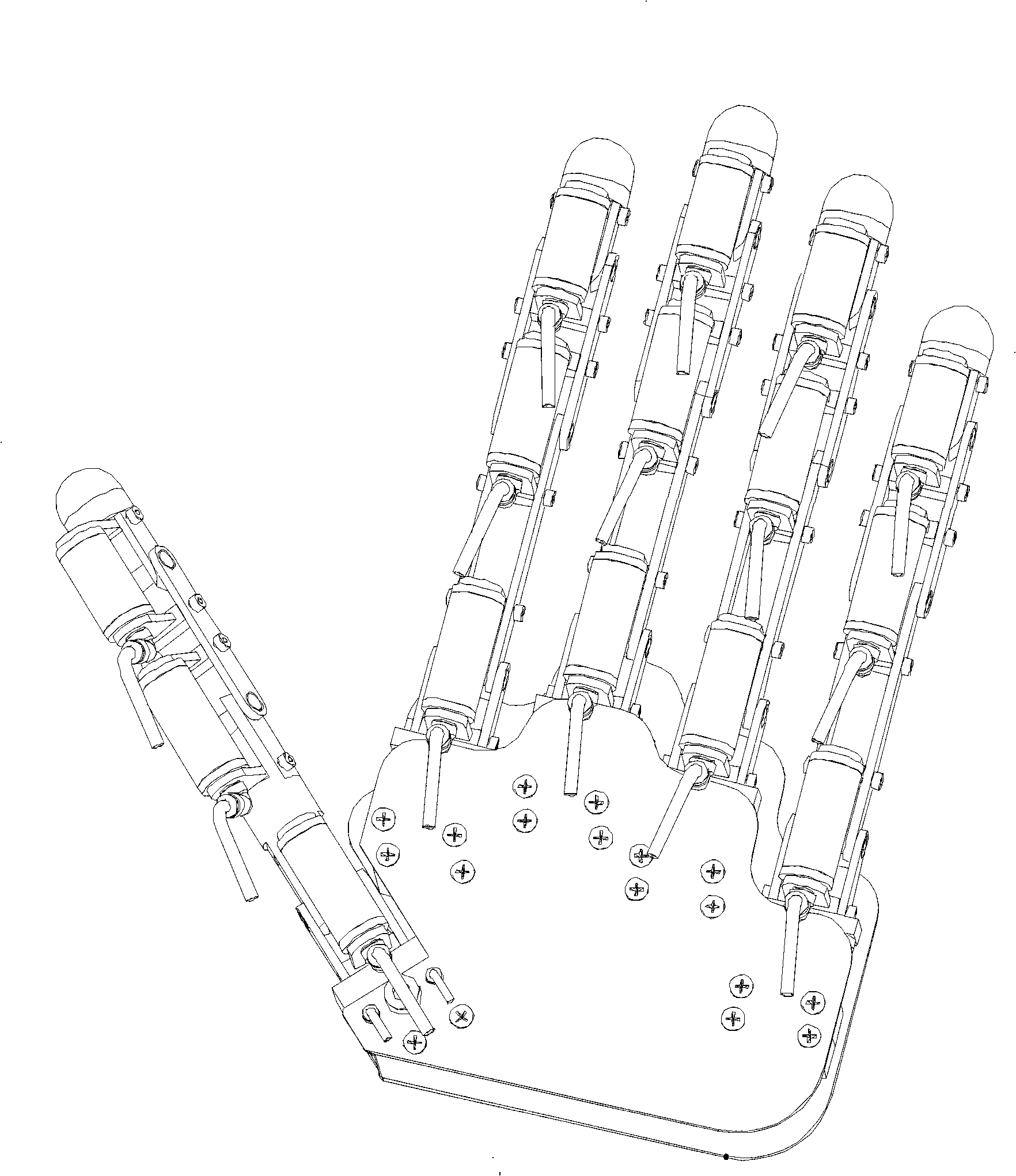
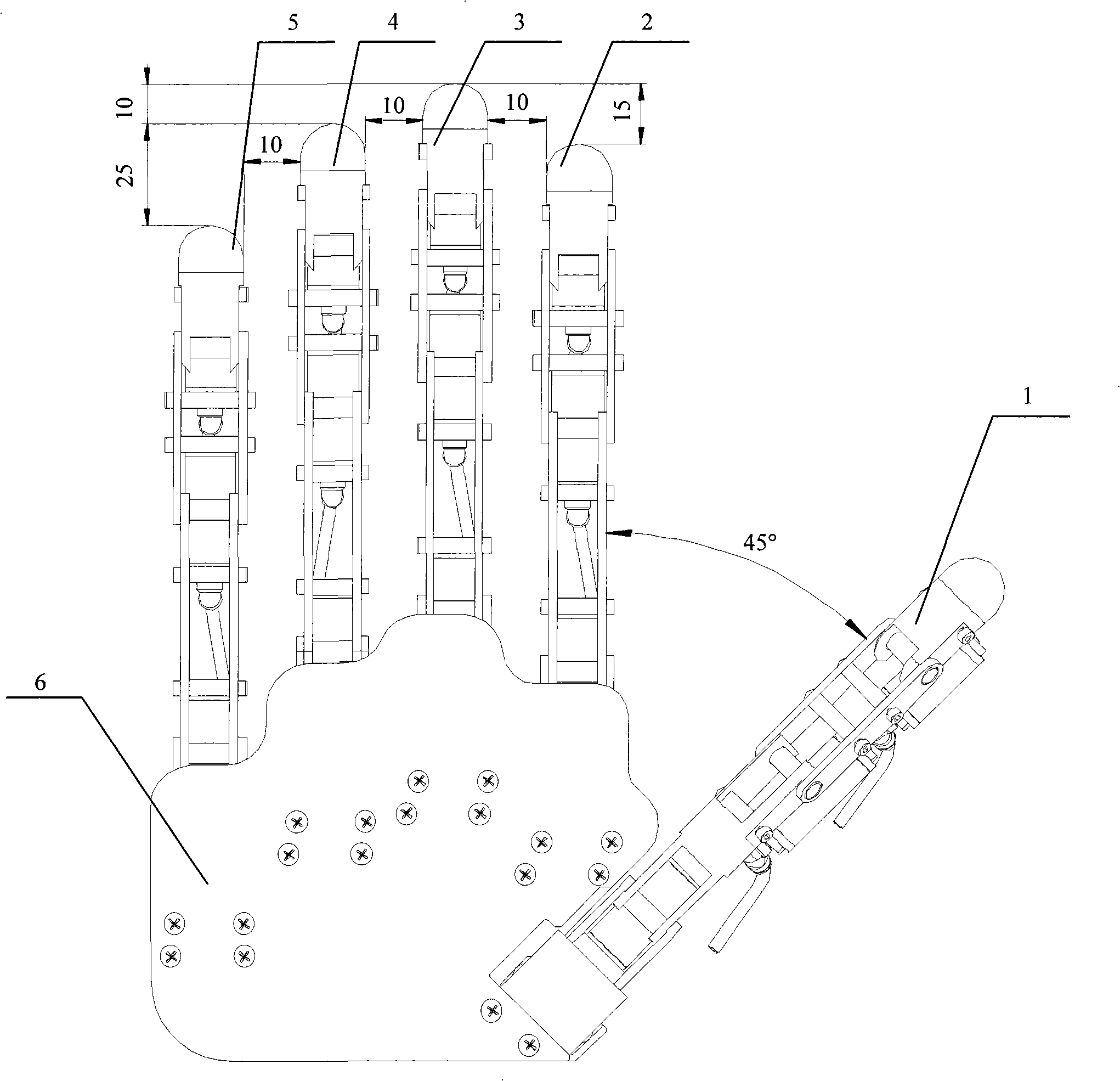
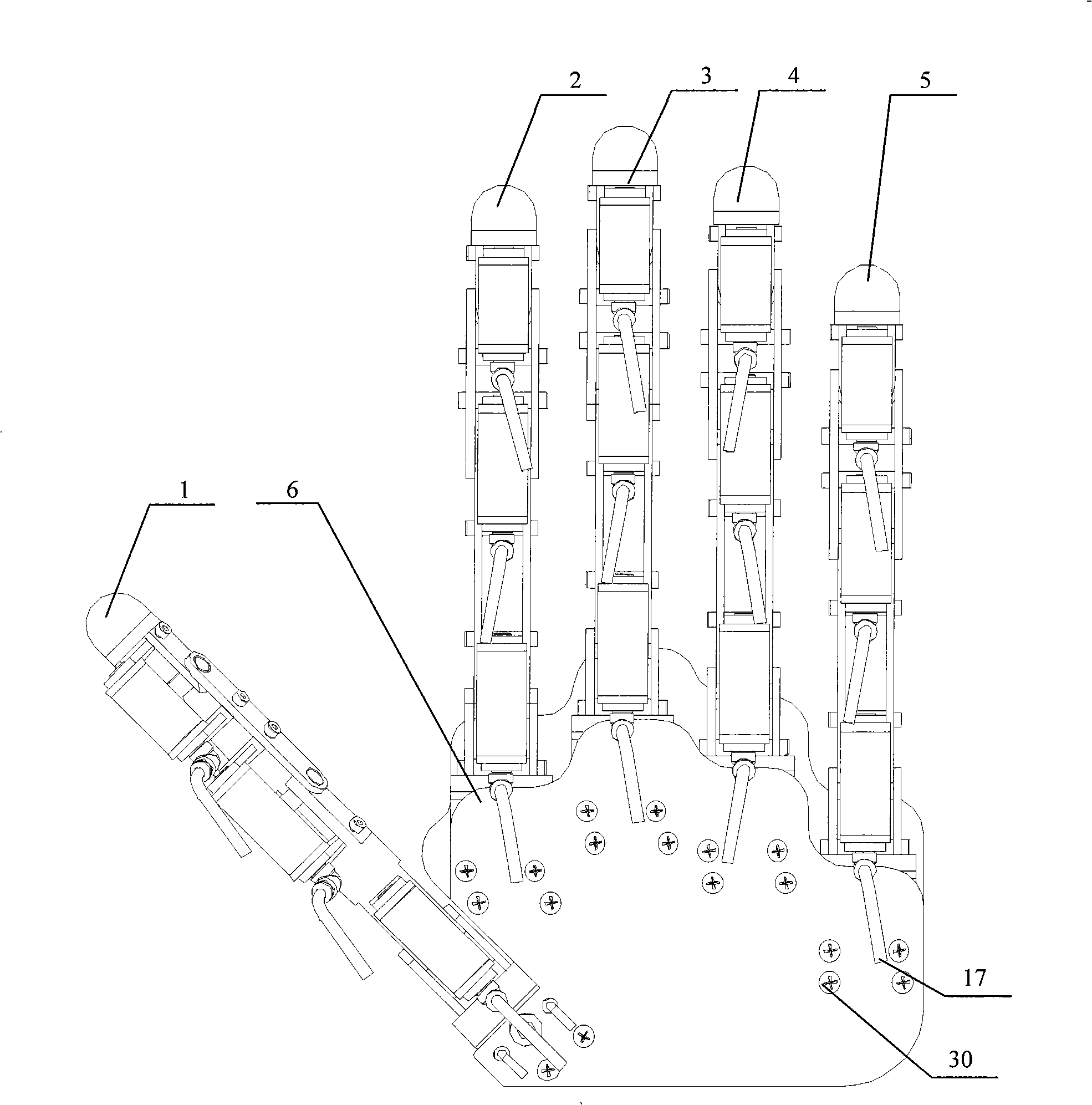
[0054] refer to Figure 1 to Figure 23 , a robotic multi-fingered dexterous hand based on pneumatic flexible actuators, including five fingers and a palm 6, with five finger mounts inside the palm; the five fingers are thumb 1, index finger 2, middle finger 3, and ring finger 4 And little finger 5, wherein: index finger 2, middle finger 3, ring finger 4 and little finger 5 have the same structure, respectively have 4 joints, 4 knuckles, first carpal bone 23 and first fingertip 18, and described 4 joints include three a bending joint and the first side pendulum joint IV; the four knuckles are respectively the first far knuckle 19, the first middle knuckle 20, the first proximal knuckle 21 and the first metacarpal joint 22, the first far knuckle The upper end of the joint 19 is connected with the first fingertip 18, the lower end of the first distal knuckle 19 is connec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com