Precision matching method for multiple depth image
A technology of depth image and accurate registration, applied in image analysis, image data processing, instruments, etc., can solve the problems of underutilization, affecting calculation speed and accuracy, and achieve high computing efficiency, stability, and computing efficiency. Improved, high numerical stability effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
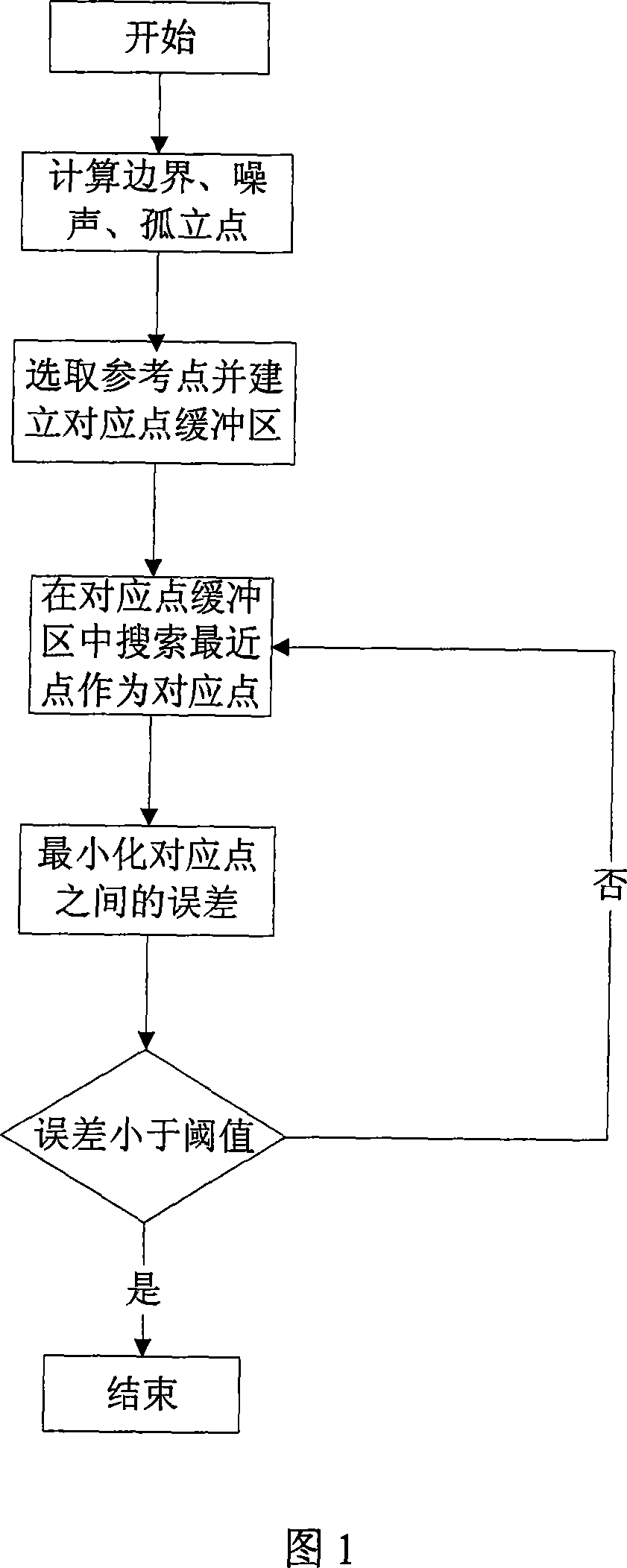
[0022] As shown in Figure 1, the specific steps of the present invention are as follows:
[0023] 1. Inspection of boundary points, noise points and outliers
[0024] For any point p, the steps to determine whether it is a boundary point, a noise point, or an outlier point are as follows:
[0025] In the first step, for any point p in the depth image, its spherical neighborhood with radius r is denoted as NB(p,r)={q|‖p-q‖<r}, that is, the point whose distance to p is less than r.
[0026] The second step is to use principal component analysis to establish a local coordinate system at point p, where p is the origin, and the z-axis (the eigenvector corresponding to the smallest eigenvalue) is the normal vector of p, and the x and y axes (the remaining two eigenvectors) ) Zhang into the tangent plane σ of p.
[0027] In the third step, because the manifold surface is locally homeomorphic to the circular surface, point p and its neighborhood are projected onto σ, and point q i The pro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com