[0009]The present invention was made in view of the foregoing and its object is to provide, in a vehicle having the brake hold function, a controller and a control method that can improve starting characteristic when the brake hold control is released.
[0011]According to the present invention, while the brake hold control is being executed,
creep force of the vehicle is stopped until the degree of acceleration request by the driver (for example, actual accelerator pedal position) exceeds the second degree smaller than the first degree, in order to reduce unnecessary
energy consumption. The creep force refers to the driving force for moving the vehicle forward at
slow speed, even in a state in which the accelerator pedal is not operated, or almost not operated. If the degree of acceleration request exceeds the second degree thereafter, the creep force is recovered even if brake hold control is continued. Therefore, by the time the degree of acceleration request attains to the first degree and the brake hold control is released, a torque corresponding to the creep force has already been acting on the vehicle drive line, in a direction of moving the vehicle forward. Therefore, when the brake hold control is released and the driving force is increased, the direction of torque acting on the drive line is not changed. As a result, it becomes unnecessary to limit the amount of increase of the driving force per unit time. As compared with the
recovery of creep force at the time of releasing brake hold control, the amount of increase of the driving force per unit time can be made larger. As a result, for a vehicle having the brake hold
control function, a controller is provided that can improve starting characteristic when the brake hold control is released.
[0013]According to the present invention, when the creep force is recovered, the creep force attains to the maximum in a period from the start of
recovery of the creep force to the release of brake hold control. Therefore, starting characteristic at the time of releasing the brake hold control can be improved. In addition, as the creep force increases more moderately than when the creep force is maximized immediately after
recovery of the creep force (that is, when the degree of acceleration request exceeds the second degree), abrupt change in torque applied to the drive line can be prevented.
[0015]According to the present invention, when the creep force is recovered, the creep force is increased in accordance with the degree of acceleration request by the driver (for example, actual accelerator pedal position). By such an approach, unnecessary energy can be reduced by making the creep force smaller when, for example, the degree of acceleration request is low. Further, the creep force is increased to be closer to the maximum value as the degree of acceleration request comes closer to the first degree, to be ready for the release of brake hold control. Therefore, starting characteristic when the brake hold control is released can be improved. In addition, as the creep force increases more moderately than when the creep force is maximized when the degree of acceleration request exceeds the second degree, abrupt change in torque applied to the drive line can be prevented.
[0016]More preferably, the
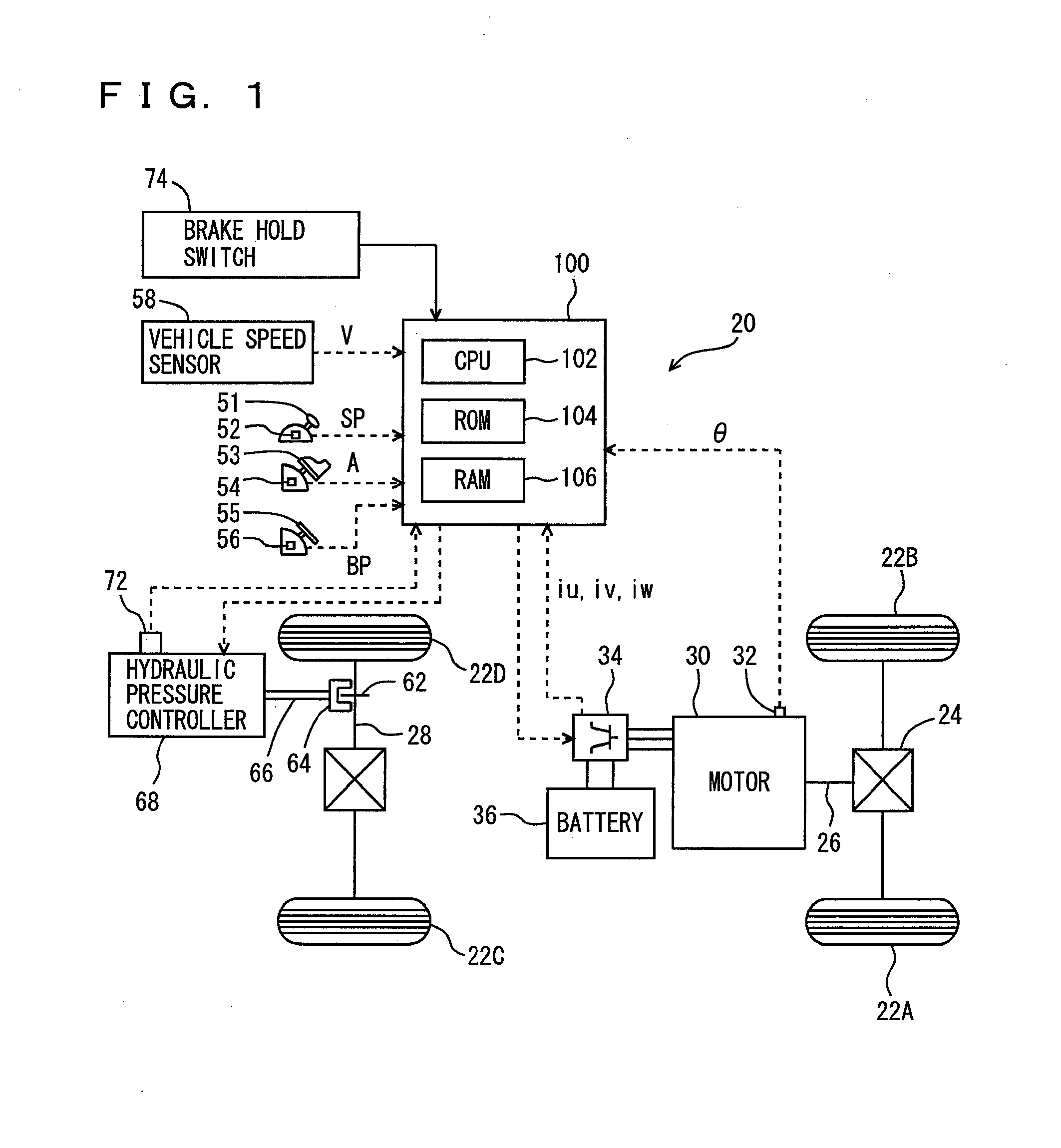
control unit calculates a creep torque reflection ratio based on a state of the vehicle, calculates a requested driving force of the vehicle based on the creep torque reflection ratio, controls driving force of the vehicle based on the requested driving force, limits the requested driving force until the requested driving force exceeds a predetermined value, stops the creep force by setting the creep torque reflection ratio to approximately zero until the degree of acceleration request exceeds the second degree, and increases the creep torque reflection ratio when the degree of acceleration request exceeds the second degree, thereby to recover the creep force.
[0017]According to the present invention, until the requested driving force calculated based on the creep torque reflection ratio exceeds a predetermined value, the requested driving force is limited and the driving force is limited. Therefore, when the degree of acceleration request exceeds the second degree, the creep torque reflection ratio is increased even when brake hold control is being executed, and the creep force is recovered. Since the creep torque reflection ratio is increased while the brake hold control is being executed, by the time the brake hold control is released, the requested driving force has already attained to a certain value that is close to or exceeding the predetermined value. Therefore, when the brake hold control is released, the driving force is not limited, or the time period in which the driving force is limited becomes shorter. Consequently, starting characteristic when the brake hold control is released can be improved.


 Login to View More
Login to View More  Login to View More
Login to View More