Serial-parallel TCM massage robot
A robot and parallel technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of inflexible rotation, small work space, and difficult control, and achieve sensitive and rapid movements, increased work space, and decoupling Good results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
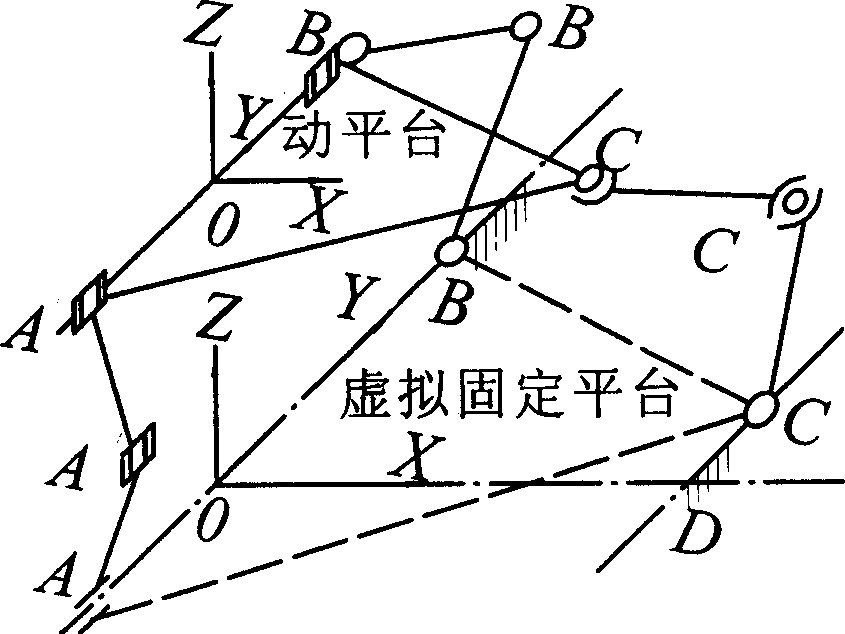
[0023] figure 1 The three-degree-of-freedom parallel mechanism consists of a virtual triangle fixed platform ABC, an isosceles triangle moving platform A'B'C', and three branch chains AA"A', BB"B', CC"C' connecting the virtual fixed platform and the moving platform. .The branched chain AA"A' is R∥R∥C, the branched chain BB"B' is R⊥R∥R∥R, and the branched chain CC"C' is S-S-R. The axis of rotary pair B is parallel to the axis of rotary pair C and perpendicular to the guide line of cylindrical pair A. Establish the coordinate system as shown in the figure: the moving coordinate system is set on the moving platform A'B'C', the origin O' is located at the midpoint of A'B', the Y' axis is selected on the A'B' axis, and the Z' axis Perpendicular to the moving platform, the fixed coordinate system is set on the virtual fixed platform ABC, the Y axis is selected on the guide rail AB line, and OA is equal to O'A', the Z axis is perpendicular to the upper platform, and the X' axis and ...
Embodiment 2
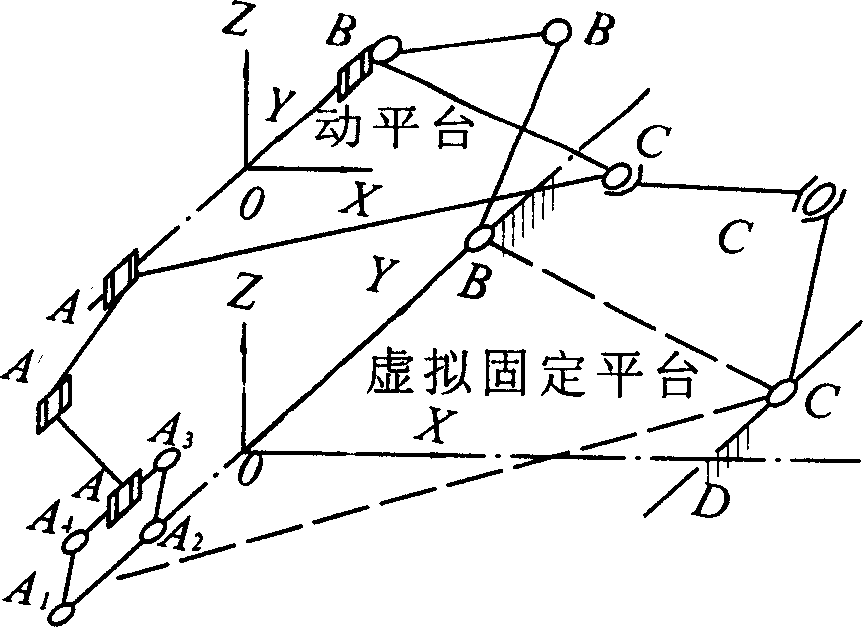
[0026] The three-degree-of-freedom parallel mechanism consists of a virtual triangle fixed platform ABC, an isosceles triangle moving platform A'B'C' and three branch chains AA"A', BB"B', CC"C' connecting the fixed platform and the moving platform. Among them, the branched chain AA"A' is R∥R∥R⊥(4r) (4r is a parallelogram mechanism); the branched chain BB"B' is R⊥R∥R∥R; the branched chain CC"C' is S-S-R. The axes of the four rotating pairs (4r) and the rotating pair B of the parallelogram mechanism are parallel to the axis of the rotating pair C. According to the mechanism configuration, by analyzing the motion characteristics of each branch chain, it is concluded that the moving platform of the parallel mechanism has 3 degrees of freedom relative to the fixed platform: 2 moving and 1 rotating.
[0027] The series-parallel TCM massage robot mechanism is attached Figure 4 shown. Will image 3The virtual fixed platform ABC of the three-degree-of-freedom parallel mechanism is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com