Crawler multi-sucker wall-climbing robot and its implement method
A wall-climbing robot and technology for implementing methods, applied in chemical instruments and methods, cleaning methods using tools, cleaning methods and utensils, etc., can solve the problems of not being independent, having many pipelines, and many pipelines
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] specific implementation plan
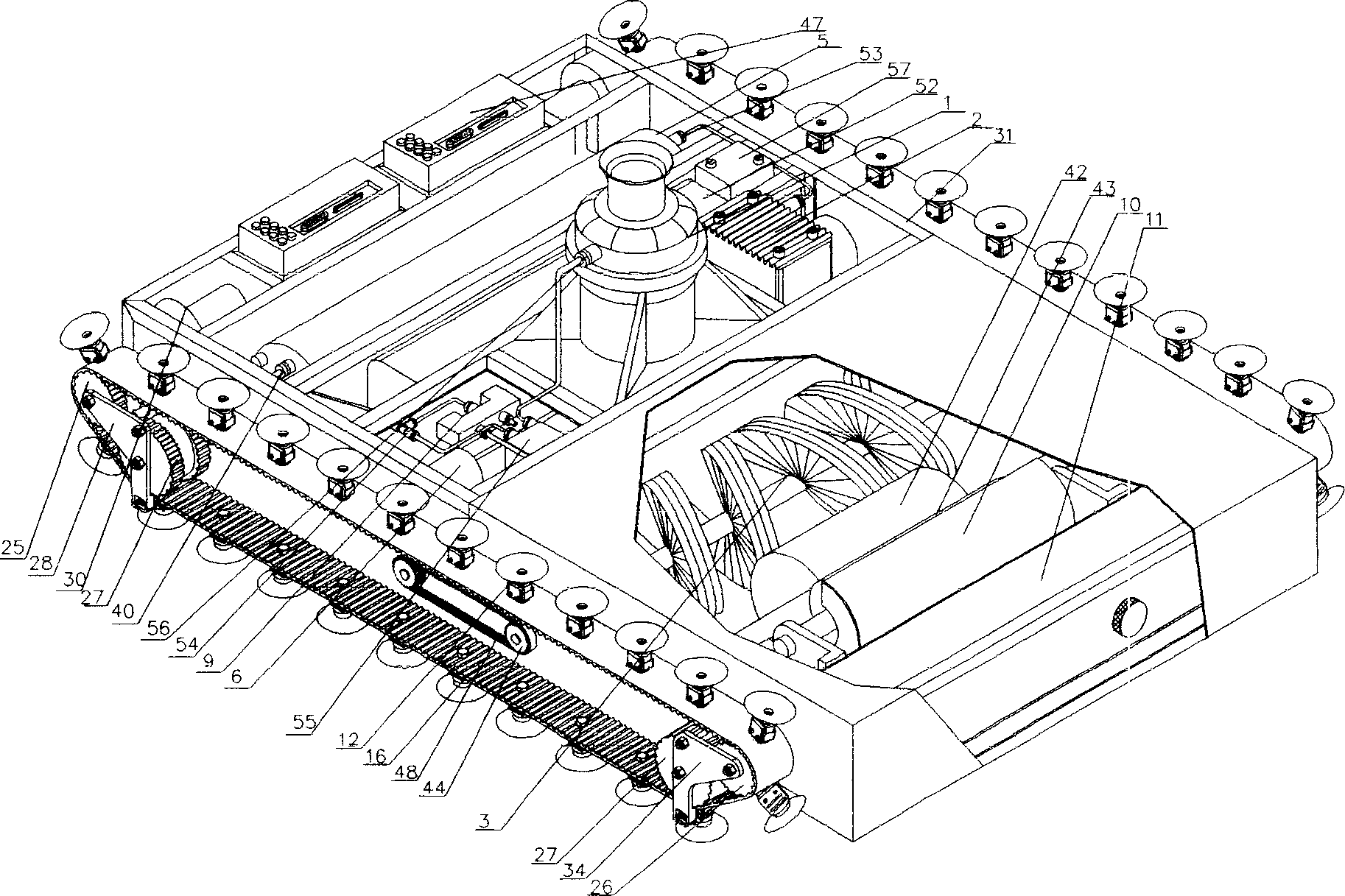
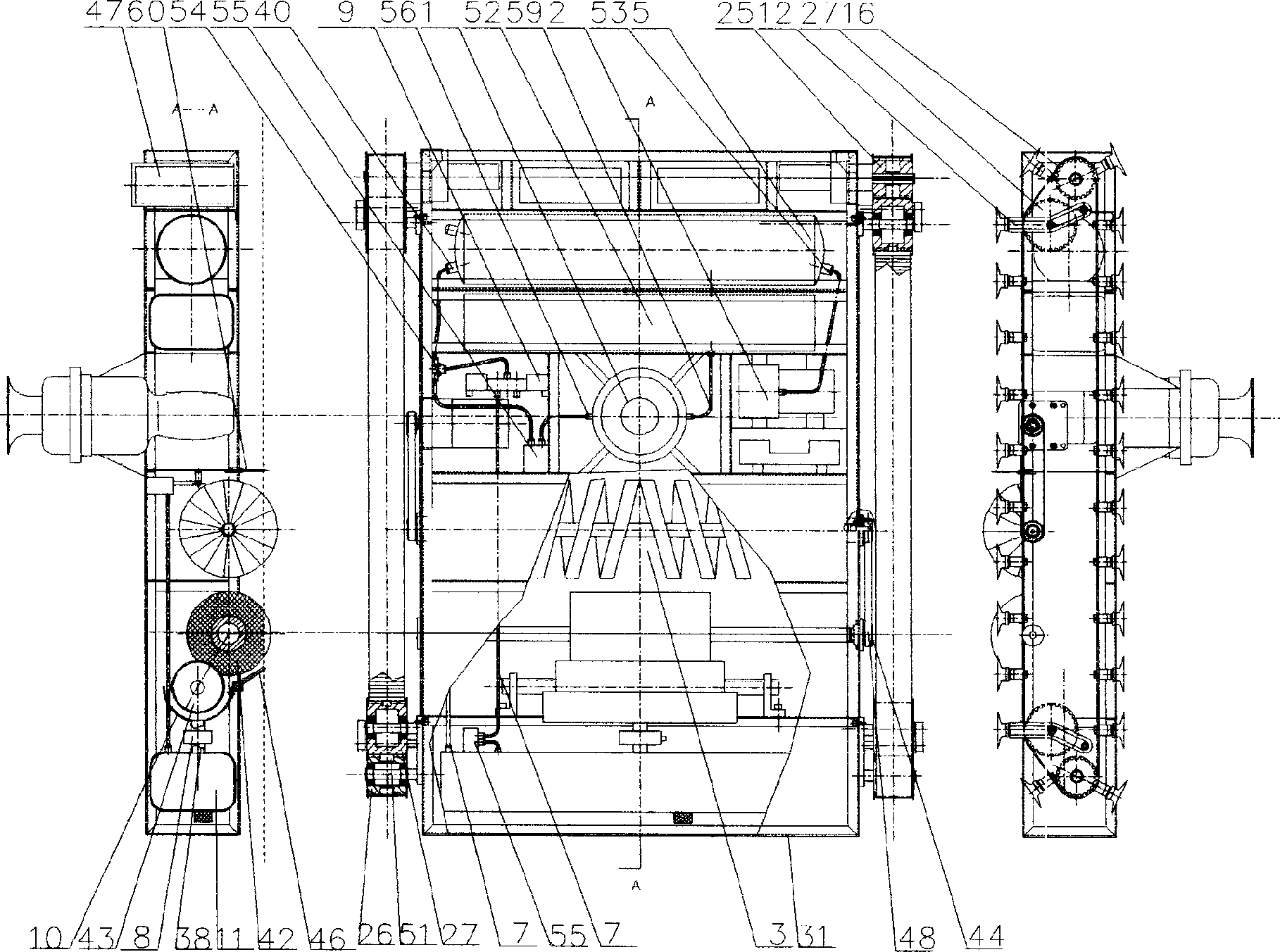
[0015] When the robot of the present invention started to work, the accumulator 57 started to supply power to the controller 47, and the micro-air compression pump 2 supplied oil through the oil inlet pipe 59 of the fuel tank 52 to start the turbojet engine 1, and a certain positive pressure was generated on the robot body. , which acts on the crawler-type multi-sucker 12, due to the effect of a certain positive pressure, the volume of the vacuum chamber of the multi-sucker shrinks, and most of the gas is excluded, so that a certain degree of vacuum is formed in the vacuum chamber of the multi-sucker, so that the vacuum sucker 12. When the adsorption effect is generated on the contacting wall surface, the robot will obtain sufficient adsorption force to ensure that the robot is reliably adsorbed on the wall surface. The driving wheel 25 is driven by the AC servo motor 30, and under the action of the main wheel 25 and the driven wheel 26, t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com