Vehicle trajectory optimization method for conflict elimination of main line entrance ramp confluence area
A technology of vehicle trajectory and optimization method, applied in the direction of traffic flow detection, combustion engine, internal combustion piston engine, etc., can solve the problems of lack, unfavorable confluence conflict, complex computing ability, etc., to achieve the effect of conflict elimination
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
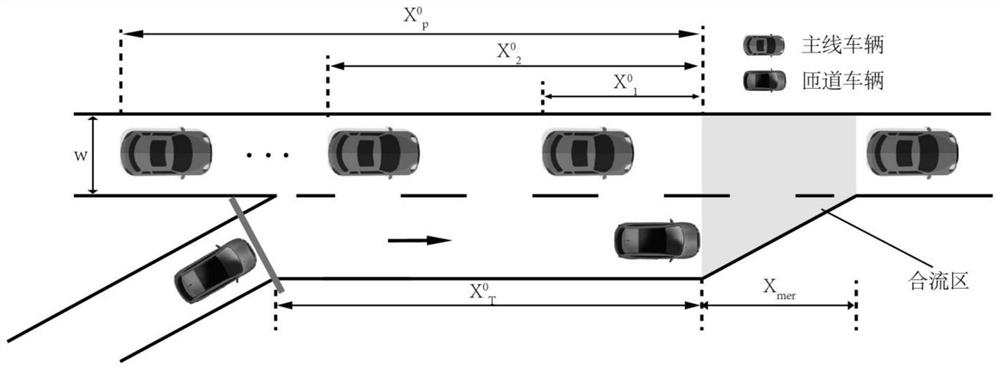
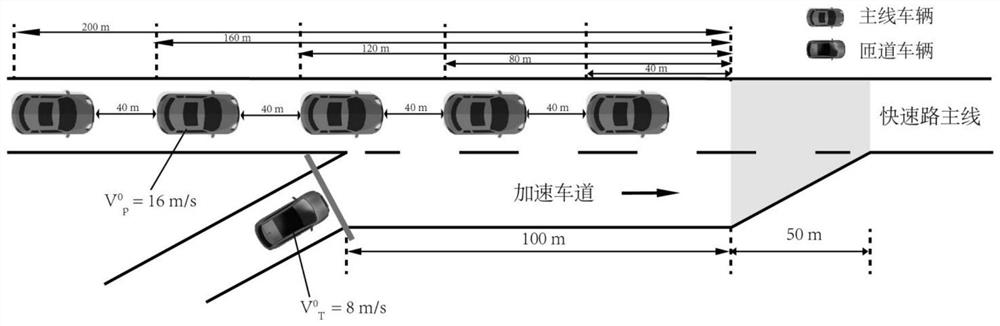
[0065] The geometric conditions of the scene in Embodiment 1 of the present invention are as follows figure 2 As shown, the expressway main line is set with an outermost lane, the ramp is normally connected, and the ramp vehicle is set as one vehicle, using the method in the present invention, with the maximum average speed of all vehicles as the optimization goal, the speed trajectory of the vehicle is controlled, and with the The general vehicle merging methods are compared. The design input parameters are: Δt, the unit time interval of system operation, which is 0.5s; T mer , the total running time of the system, take 30s; x mer , the longitudinal length of the ramp confluence functional area, taken as 50m; The initial coordinate position of the expressway main line vehicle, take -40, -80, -120, -160, -200; The initial coordinate position of the ramp vehicle, take -100; N, the number of vehicles on the main line of the expressway, take 5veh; v max , the maximum speed...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com